
Fig. 15.
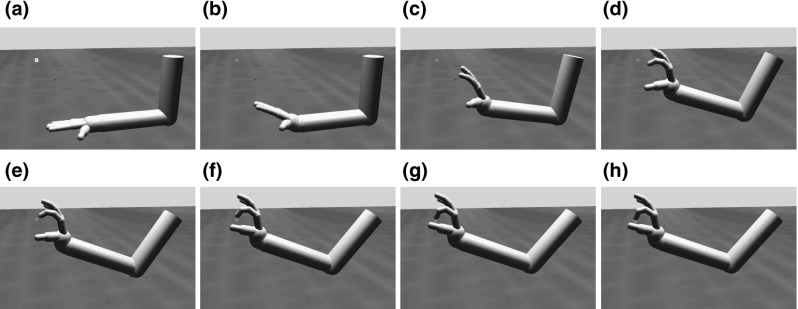
A series of frames showing the progression of a precision pinch of a small cube generated by the model. After the go signal (b), hand preshaping and wrist rotation has begun (c). The enclose phase is triggered in d and the object is first contacted in f