
Fig. 3.
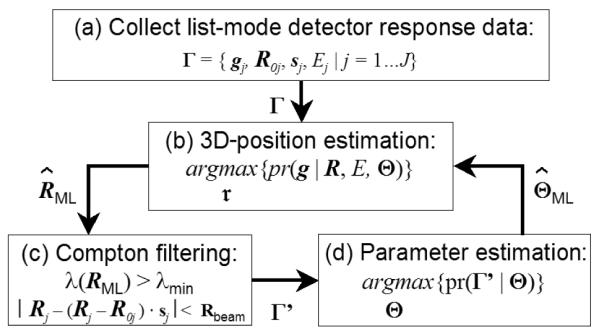
Calibration procedure of detector response statistics (i.e., as a function of 3D interaction position. (a) The detector response is measured for an ensemble of gamma rays with known input position, direction, and energy. Event data are initially filtered to keep only photopeak events. (b) An ML estimate of 3D position for each photopeak event is determined. An initial estimate of is made (from 2D MDRF or simulation). (c) Photopeak event data are filtered further by applying a likelihood threshold on 3D-position ML estimate and by using prior knowledge of the collimated beam profile. (d) An ML estimate of Θ is made. Steps (b)–(d) are repeated until a steady-state solution is reached.