
Fig. 10.
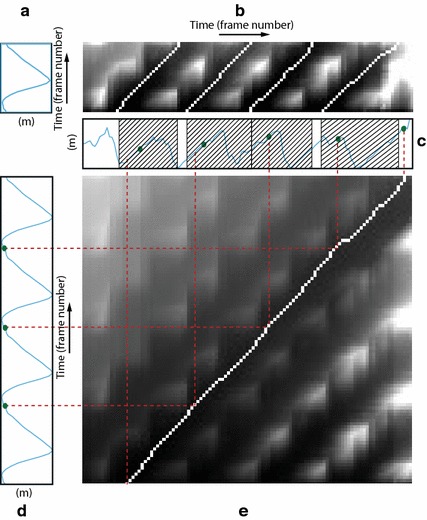
Contiguous estimation of time instants. a Second coordinate of the right ankle, extracted from . b Accumulated cost matrix . Four local minima along the top edge identify the ending times of four matching subsequences. Four traced-back paths identify the starting times. c Second coordinate of the right ankle extracted from . right strides with length are identified, and two gaps between matching subsequences are formed. The green dots represent the ground-truth segmentation. d Second coordinate of the right ankle, extracted from the concatenation of four templates . e Accumulated cost matrix . The minimum along the top edge identifies the ending time of four right strides. The traced-back path identifies the starting time. Heel strike and toe-off instants are identified by mapping them from the time domain of the concatenated templates (d), to the time domain of the trial walk (c), according to the warping path (red lines)