
Fig. 1.
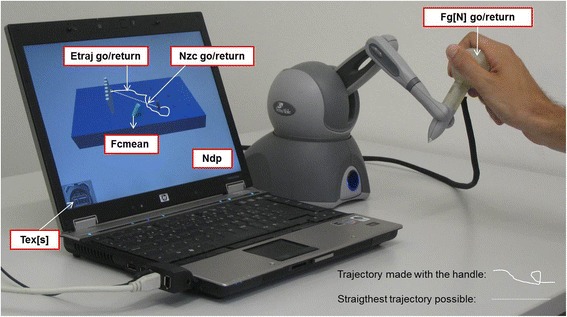
VPIT setup and upper limb function parameters. Tex[s]: execution time in seconds; Ndp: number of dropped pegs during transport. Kinematic parameters: Etraj[cm]go/return: trajectory error: Nzc[1/s]go/return: number of zero-crossings of the acceleration. Kinetic parameters: Fg[N]go/return: mean grasping force; Fcmean[N]: mean collision force