
Table 1. Parameters used to simulate movement paths under the four scenarios.
| Data type | Δγ | γ1 | γ2 | θ1 | θ2 | α1 | α2 | ∑ (km) | Ω | τq | vq |
|---|---|---|---|---|---|---|---|---|---|---|---|
| GPS | 0.85 | 0.95 | 0.10 | 0 | π | 0.90 | 0.10 | 5 | 0.05 | – | – |
| GPS | 0.55 | 0.65 | 0.10 | 0 | π | 0.90 | 0.10 | 5 | 0.05 | – | – |
| Argos | 0.85 | 0.95 | 0.10 | 0 | π | 0.90 | 0.10 | 5 | – | 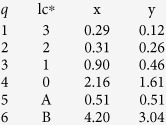 |
 |
| Argos | 0.55 | 0.65 | 0.10 | 0 |  |
0.90 | 0.10 | 5 | – |
Values given under ∑ and Ω are SD in km and are equal in both x and y directions. For simplicity, covariance terms are set to 0. Parameter estimates for τq and vq are from11. Scale parameters τq are in km. lc is the Argos location quality class.