
Figure 1.
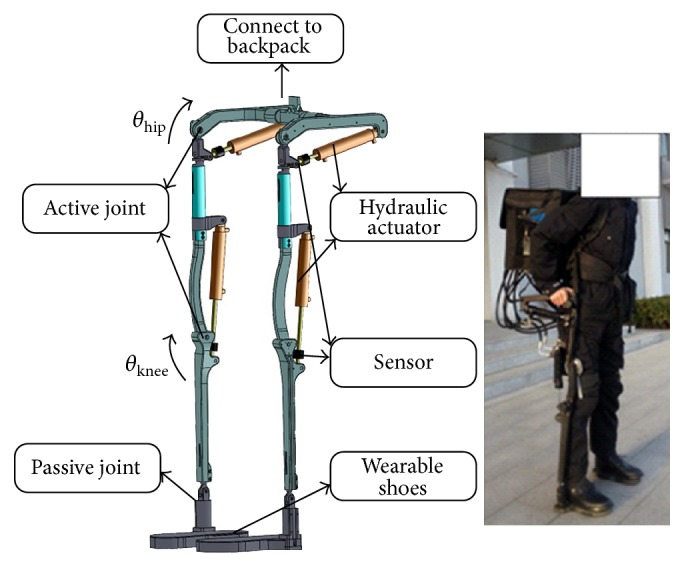
Prototype of lower limb powered exoskeleton. There are two active joints of each leg in walking direction, which are represented as θhip and θknee. All auxiliary facilities are packaged in the backpack.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
Prototype of lower limb powered exoskeleton. There are two active joints of each leg in walking direction, which are represented as θhip and θknee. All auxiliary facilities are packaged in the backpack.