
Fig. 1.
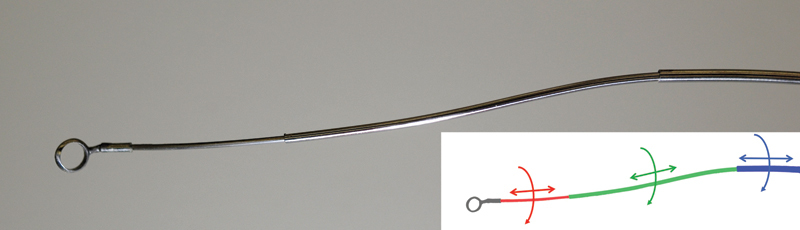
A concentric tube continuum robot made from three precurved superelastic nitinol tubes. The robot is able to move like a tentacle by rotating and translating the tubes inside one another. Each of the 6 degrees of freedom is shown in the inset drawing. An angled ring curette, which can be axially rotated, is attached to the tip of the robot, similar to the curettes used in endonasal pituitary tumor removals.