
Fig. 2.
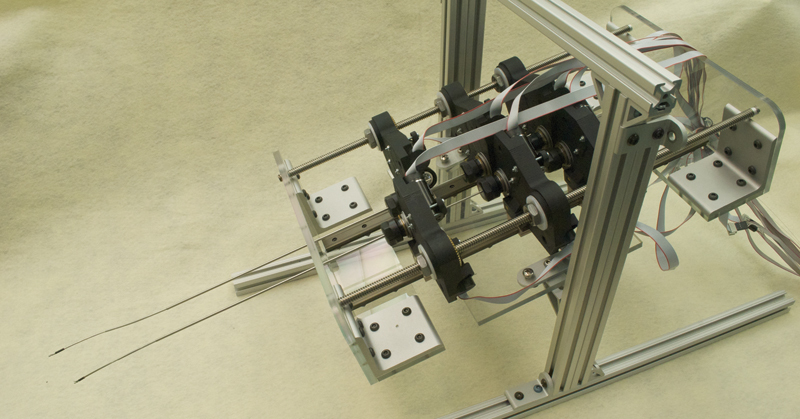
The actuation unit used to translate and rotate the tubes. Each tube is grasped at its base and may be translated and rotated independently of the others, creating a tentacle-like motion.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
The actuation unit used to translate and rotate the tubes. Each tube is grasped at its base and may be translated and rotated independently of the others, creating a tentacle-like motion.