
Fig. 5.
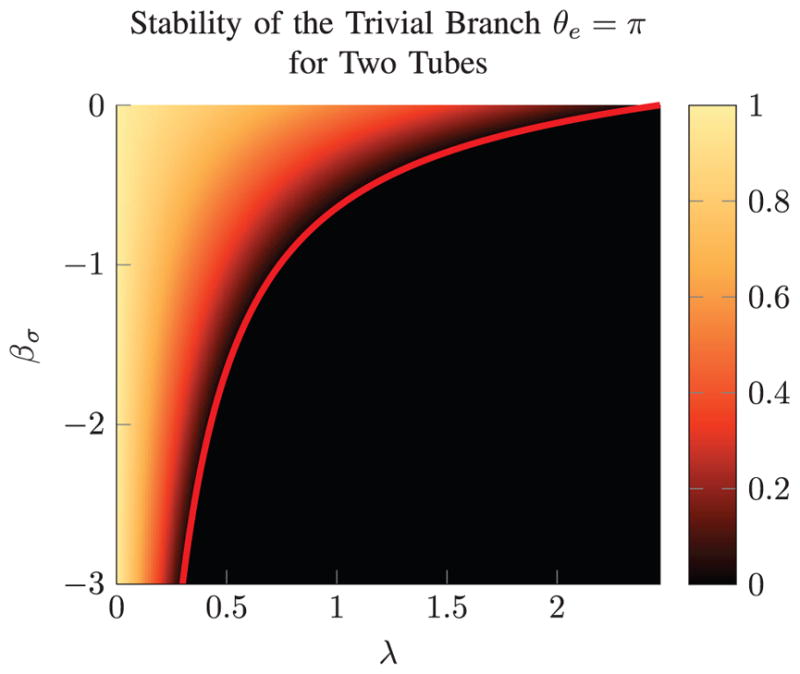
This plot shows the relative stability of the θe = π trivial branch. The red curve gives the bifurcation result from (9). A point above this curve guarantees stability for two tubes across all rotational actuation, while a point below indicates a bifurcation, and a snap will be seen for some rotational actuation. Relative stability values less than 0 have been truncated to 0.