
Fig. 4. Schematic representation of a transition from a centralized to a decentralized information flow scenario.
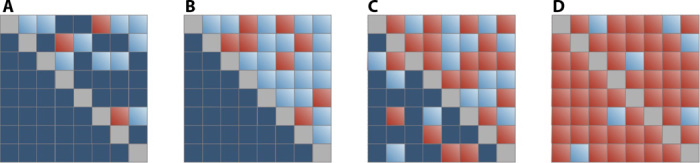
If, for any given pair (x, y), , all existent dynamical driving is net driving; that is, subsystems present a highly hierarchical structure. In this scenario, if a subsystem dominates another one, the former is not dominated by the latter. This is well illustrated in (A) and (B). Note, however, that only a few subsystems play an active (dynamical) role in (A),whereas the situation has reached a perfectly hierarchical structure in (B). Indeed, in this idealized situation, the net transfer entropy reaches its maximum: any further addition in terms of dynamical driving will decrease the amount of net transfer entropy [as in (C)]. Furthermore, (B) and (C) illustrate that there exists a tipping point beyond which the event has necessarily gone global. The extreme case where every subsystem exerts some amount of dynamical driving results in a “null driving” scenario [as in (D)]. In this schematic representation, the color scales go from dark blue to red, that is, zero to maximum transfer entropy, respectively.