
Fig. 10.
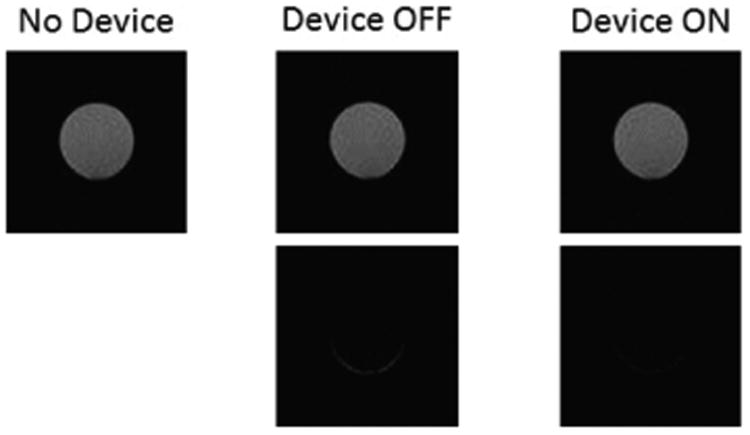
Phantom scans without the haptic interface (baseline) (top left), with the interface present and at rest (top middle) and running (top right). The differences with respect to baseline (bottom images) show neither deformations nor dark spots.