
Fig. 11.
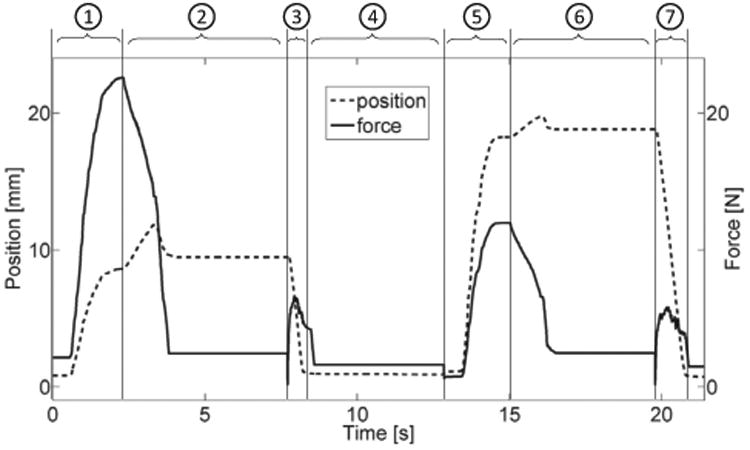
Pinching position and force data during two consecutive representative trials of the experimental validation. Numbers on the top represent trial phases: (1) & (5) – active pinching against virtual spring load; (2) & (6) – fingers' position locked; (3) & (7) – robot passively moves fingers back to initial position; (4) randomized time between trials.