
Fig. 4.
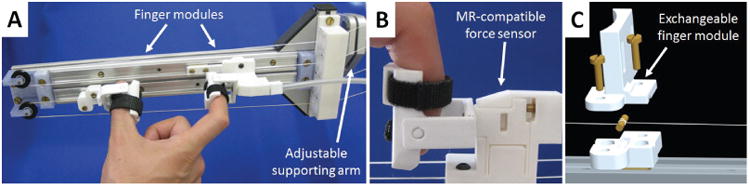
A: End-effector finger interface with a typical hand pinching position. The two finger modules are attached to each of the two cable loops. An adjustable supporting arm allows for positioning the finger interface in various orientations. B: Custom made MR-compatible force sensor [42] attached to one of the finger modules for pinching force detection. C: Exploded view CAD rendering of the finger module. The top part can be easily exchanged to accommodate for various users or tasks. The finger module is attached to the cable loop using a pin mechanism with the cable wrapped around it and then rigidly fixed with screws.