
Fig. 5.
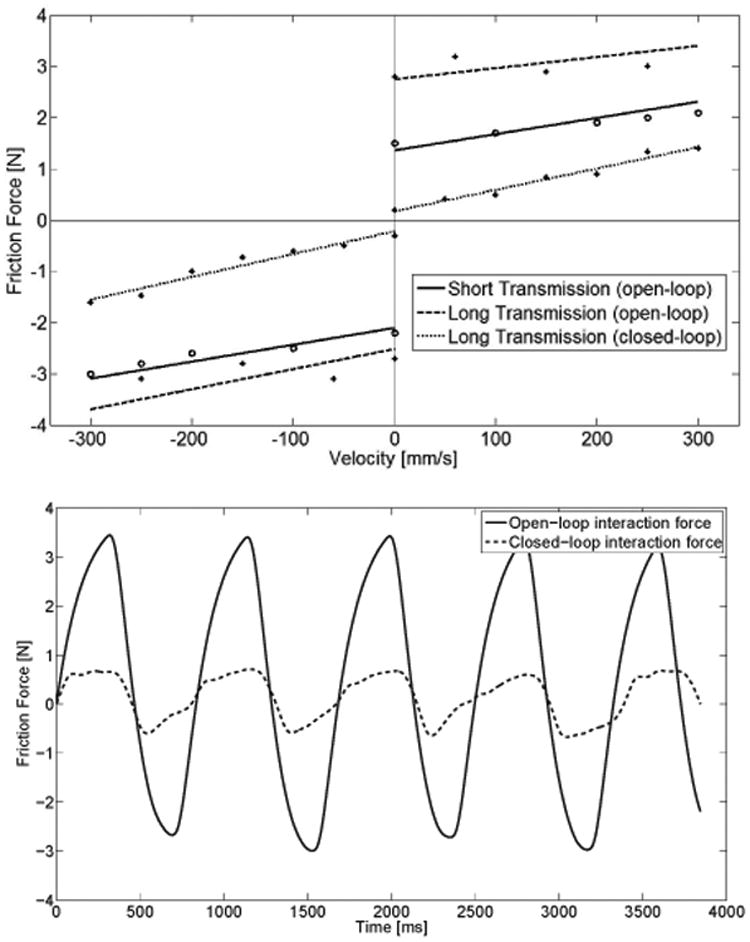
Top: Friction identification portraying the static friction and dynamic friction curves for both positive and negative directions in 3 tested conditions: open-loop (no control) for a short (∼ 0.3 m) and long (∼ 2.6 m) transmission, and closed-loop (force feedback) for the long transmission. Bottom: Example of interaction force with and without force feedback during a sinusoidal movement (maximum velocity ∼ 100 mm/s) of the end-effector.