
Fig. 9.
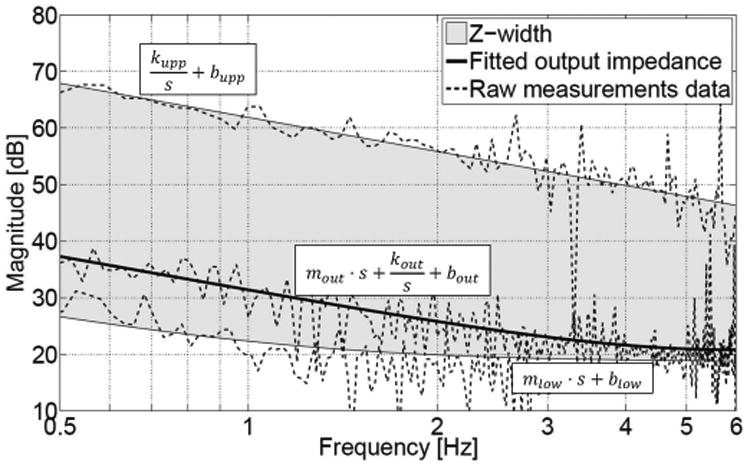
Output impedance of NeuRoGrasp (passive device dynamics) and its renderable impedance range (Z-width). An impedance controller with friction feedforward (Eq. 5) was implemented to obtain the lower impedance boundary, while a simple impedance (spring-damper) controller (Eq. 6) was used to determine the upper impedance boundary. A mass-spring-damper, a mass-damper, and a spring-damper mechanical model were fit to the raw measured output impedance (middle curve), lower impedance boundary (bottom curve), and upper impedance boundary (top curve). In the latter case, the fidelity of the haptic rendering was determined to be 93.5% between the commanded (kw ∼ 7.3 N/mm) and measured fitted (kw ∼ 7.8 N/mm) stiffness parameters, and 82.5% between the commanded (bw ∼ 68.7 N/(m/s)) and measured fitted (bw ∼ 83.2 N/(m/s)) damping parameters, respectively.