
Figure 3.
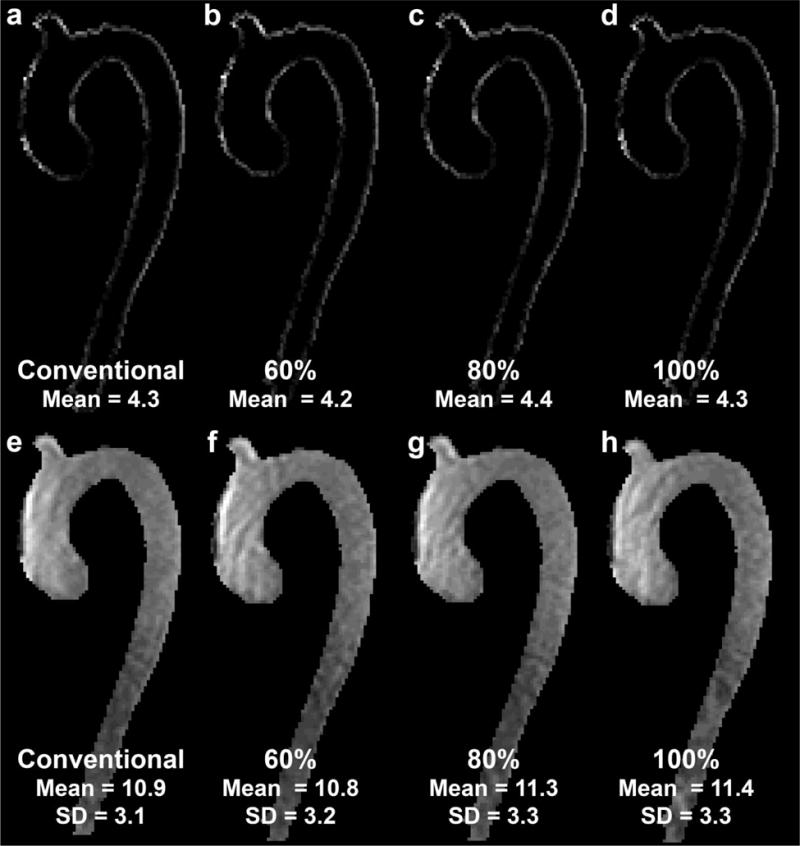
Typical (volunteer 2, 1.5T) images for magnitude edge sharpness (top row) with (a) conventional navigator gating, fixed Seff = (b) 60%, (c) 80% and (d) 100%. Bottom row: visibility (signal, mean) and noise (standard deviation SD) images for the same volunteer with (a) conventional navigator gating, fixed Seff = (b) 60%, (c) 80% and (d) 100%.