
Fig 1. A BCI has an effector, such as a robotic arm, with predefined degrees of freedom.
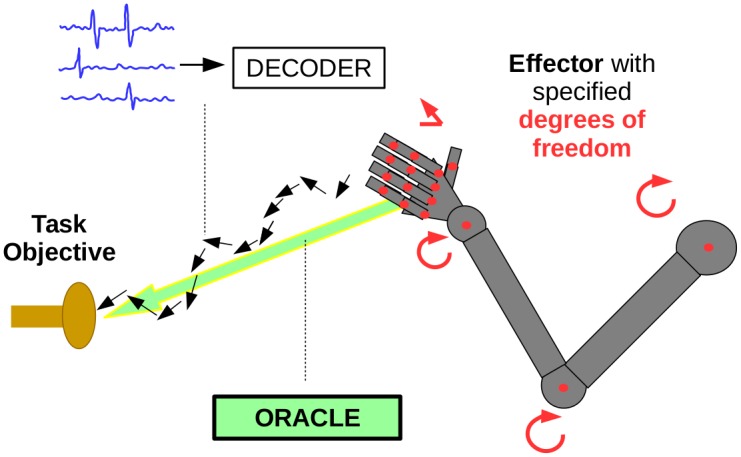
Given a task objective (e.g. an objective function corresponding to reaching and grasping a target), an intention-oracle can be computed to provide the intended updates to the arm kinematics. The actual trajectory of the arm is evaluated deterministically from the neural activity via the decoder. In practice, the oracle update would be recomputed at each timestep to reflect the instantaneous best movement in the direction of the goal.