

Abstract
Neural-like computing models are versatile computing mechanisms in the field of artificial intelligence. Spiking neural P systems (SN P systems for short) are one of the recently developed spiking neural network models inspired by the way neurons communicate. The communications among neurons are essentially achieved by spikes, i. e. short electrical pulses. In terms of motivation, SN P systems fall into the third generation of neural network models. In this study, a novel variant of SN P systems, namely SN P systems with self-organization, is introduced, and the computational power of the system is investigated and evaluated. It is proved that SN P systems with self-organization are capable of computing and accept the family of sets of Turing computable natural numbers. Moreover, with 87 neurons the system can compute any Turing computable recursive function, thus achieves Turing universality. These results demonstrate promising initiatives to solve an open problem arisen by Gh Păun.
In the central nervous system, there are abundant amount of computational intelligence precipitated throughout millions of years of evolution. The computational intelligence has provided plenty of inspirations to construct powerful computing models and algorithms1,2,3. Neural-like computing models are a class of powerful models inspired by the way how neurons communicate. The communication among neurons is essentially achieved by spikes, i.e. short electrical pulses. The biological phenomenon has been intensively investigated in the field of neural computation4. Using different mathematic approaches to describe neural spiking behaviours, various neural-like computing models have been proposed, such as artificial neural networks5 and spiking neural networks6. In the field of membrane computing, a kind of distributed and parallel neural-like computation model, named spiking neural P systems (SN P systems), were proposed in 20067. SN P systems are widely considered as a promising variant of the third generation of neural network models8.
Generally, an SN P system can be represented by a directed graph, where neurons are placed in nodes and the synapses are denoted using arcs. Every neuron can contain a number of spikes and a set of firing (or spiking) rules. Following the firing rules, a neuron can send information encoded in spikes to other neurons. Input neurons read spikes from the environment, and output neurons emit spikes into the environment. The computation result can be embodied in various ways. One of the common approaches is the time elapsed between the first two consecutive spikes sent into the environment9,10 and the total number of spikes emitted into the environment11,12,13.
For the past decade, there have been quite a few research efforts put forward to SN P systems. Notably, SN P systems can generate and accept the sets of Turing computable natural numbers14, generate the recursively enumerable languages15,16 and compute the sets of Turing computable functions17. Inspired by different biological phenomena and mathematical motivations, lots of variants of SN P systems have been proposed, such as SN P systems with anti-spikes18,19, SN P systems with weight20, SN P systems with astrocyte21, homogenous SN P systems22,23, SN P systems with threshold24, fuzzy SN P systems25,26, sequential SN P systems27, SN P systems with rules on synapses28, SN P systems with structural plasticity29. For applications, SN P systems are used to design logic gates, logic circuites30 and operating systems31, perform basic arithmetic operations32,33, solve combinatorial optimization problems34, diagnose fault of electric power systems35.
SN P systems are known as a class of neural-like computing models under the framework of membrane computing36. Spiking neural network (shortly named SNN) is a well known candidate of siking neural network models37, which incorporates the concept of time into their operating model, besides neuronal and synaptic state in general artificial neural networks, The neuron in SNN cannot fire at each propagation cycle, but only when a membrane potential reaches a specific value. When a neuron fires, it generates a signal which travels to other neurons which, in turn, increase or decrease their potentials in accordance with this signal. In SN P systems, spiking rules, denoted by formal production in grammar theory of formal languages, is used to describe the neuron's spiking behaviour, which determine the conditions of triggering spiking, the number of spikes consumed, and the number of spikes emitting to the neighboring neurons. The spikes from different neurons can be accumulated in the target neuron for further spiking. In terms of motivation of models, SN P systems also fall into the spiking neural network models, i.e., the third generation of neural network models.
Since SN P systems have more fundamental data structure (spike trains, i.e., binary strings), it performs well in achieving significant computation power with using a small number of units (neurons). It was proved by Gh Păun that 49 neurons are sufficient for SN P systems to achieve Turing universality. But, for conventional artificial neural networks, it was shown that 886 sigmoid function based processors are needed to achieve Turing universality38.
In the nervous system, synaptic plasticity forms the cell assemblies with the self-organization of neurons, which induces ordered or even synchronized neural dynamics replicating basic processes of long-term memory39,40. The self-organizing principle in the developing nervous system and its importance for preserving and continuing neural system development provide us insights on how neural-like networks might be reorganized and configured in response to environment changes. Enlightened by the biological fact, self-organizing artificial neural networks with unsupervised and supervised learning have been proposed and gain their popularity for visualisation and classification41,42. It is still an open problem as formulated by Gh Păun in ref. 43, to construct SN P systems with self-organization and to use the system to perform possible computer vision and pattern recognition tasks.
Results
In this research, a novel variant of SN P systems, namely SN P systems with self-organization, is proposed and developed. The system initially has no synapse, but the synapses can be dynamically formed during the computation, which exhibits the self-organization behaviour. In the system, creation and deletion rules are used to create and delete synapses. The applications of synapse creation and deletion rules are controlled by the states of the involved neurons, i.e., the number of spikes contained in the neurons. The computational power of the system is investigated as well. As a result, it demonstrates that SN P systems with self-organization can compute and accept any set of Turing computable natural numbers. Moreover, with 87 neurons, the system can compute any Turing computable recursive function, ergo achieves Turing universality.
Before stating the results in mathematical forms, some notations should be introduced. NmSPSOall(creh, delg, ruler) (resp. NmSPSOacc(creh′, delg′, ruler′)) denotes the family of sets of numbers computed (resp. accepted) by SN P systems with self-organization of degree m, where h (resp. h′) indicates the maximal number of synapses that can be created using a synapse creation rule, g (resp. g′) is the maximal number of synapses that can be deleted by using a synapse deletion rule, r (resp. r′) is the maximal number of rules in each neuron, and the subscript all indicates the computation result is encoded by the number of spikes emitted into the environment (resp. the subscript acc indicates the system works in the accepting mode). If the parameters are not bounded, i.e., there is no limit imposed on them, then they are replaced with *. NRE denotes the family of Turing computable sets of numbers44.
The main results of this work can be mathematically depicted by the following theorems.
Theorem 1. N*SPSOall(cre*, del*, rule5) = NRE.
Theorem 2. N*SPSOacc(cre*, del*, rule5) = NRE.
Theorem 3. There is a universal SN P system with self-organization having 87 neurons for computing functions.
These results show that SN P systems with self-organization are powerful computing models, i.e., they are capable of doing what Turing machine can do. Also, they provide potential and theoretical feasibility of using SN P systems to solve real-life problems, such as pattern recognition and classification.
In SN P system with self-organization, it has no initially designed synapses. The synapses can be created or deleted according to the information contained in involved neurons during the computation. In previous work, it was found that the information diversing ability of synapses had some programable feature for SN P systems, but the computation power of SN P systems without initial synapses is an open problem. Although this is not the first time the feature of creating or deleting synapses investigated in SN P systems, see e.g. SN P systems with structural plasticity, it is quite the first attempt to construct SN P systems has no initial synapses.
Methods
In this section, it starts by the mathematical definition of SN P system with self-organization, and then the computation power of SN P systems with self-organization is investigated as number generator, acceptor and function computing devices. It is proved in constructive ways that SN P systems with self-organization can compute and accept the family of sets of Turing computable natural numbers. With 87 neurons, such system can compute any Turing computable recursive function.
Spiking Neural P Systems with Self-Organization
Before introducing the definition of SN P system with self-organization, some prerequisites of basic concepts of formal language theory45 are recalled.
For an alphabet V, V* denotes the set of all finite strings of symbols from V, the empty string is denoted by λ, and the set of all nonempty strings over V is denoted by V+. When V = {a} is a singleton, then we write simply a* and a+ instead of {a}*, {a}+. A regular expression over an alphabet V is defined as follows: (1) λ and each a ∈ V is a regular expression; (2) if E1 and E2 are regular expressions over V, then (E1)(E2), (E1) ∪ (E2), and (E1)+ are regular expressions over V; (3) nothing else is a regular expression over V.
For each regular expression E, a language L(E) is associated, defined in the following way: (1) L(λ) = {λ} and L(a) = {a}, for all a ∈ V, (2) L((E1)∪(E2)) = L(E1) ∪ L(E2), L((E1)(E2)) = L(E1)L(E2) and L((E1)+) = (L(E1))+ for all regular expressions E1, E2 over V. Unnecessary parentheses can be omitted when writing a regular expression, and (E)+ ∪ {λ} can also be written as E*. By NRE we denote the family of Turing computable sets of numbers. (NRE is the family of length sets of recursively enumerable languages–those recognized by Turing machines).
An SN P system with self-organization of degree m ≥ 1 is a construct of the form
 |
where
O = {a} is a singleton, where a is called the spike;
σ1, σ2, …, σm are neurons of the form σi = (ni, Ri) with 1 ≤ i ≤ m, where
–  is the initial number of spikes contained in neuron σi;
is the initial number of spikes contained in neuron σi;
– Ri is a finite set of rules in neuron σi of the following three forms:
spiking rule: E/ac → ap; d, where E is a regular expression over O, d ≥ 0 and c ≥ p ≥ 0;
synapse creation rule: E′/ac′ → +(ap′, cre(i)), where E′ is a regular expression over O, cre(i) ⊆ {σ1, σ2, …, σm}/{σi} and c′ ≥ p′ > 1;
synapse deletion rule: E″/ac″ → −(λ, del(i)), where E″ is a regular expression over O, del(i) ⊆ {σ1, σ2, …, σm}/{σi} and c″ ≥ 1;
 is the initial set of synapses, which means no synapse is initially set; at any moment t, the set of synapses is denoted by synt ⊆ {1, 2, …, m} × {1, 2, …, m}.
is the initial set of synapses, which means no synapse is initially set; at any moment t, the set of synapses is denoted by synt ⊆ {1, 2, …, m} × {1, 2, …, m}.in, out ∈ {1, 2, …, m} indicates the input and output neuron, respectively.
A spiking rule of the form E/ac → ap; d is applied as follows. If neuron σi contains k spikes, and ak ∈ L(E), k ≥ c, then rule E/ac → ap; d ∈ Ri can be applied. It means that c spikes are consumed and removed from neuron σi, i.e., k − c spikes are remained, while the neuron emits p spikes to its neighboring neurons after d steps. (It is a common practice in membrane computing to have a global clock defined. The clock is used to mark the time of the whole system and ensure the system synchronization.) If d = 0, then the p spikes are emitted out immediately, if d = 1, then the p spikes are emitted in the next step, etc. If the rule is used in step t and d ≥ 1, then in steps t, t + 1, ..., t + d − 1 the neuron is closed (this corresponds to the refractory period from neurobiology), so that it cannot receive new spikes (if a neuron tries to send spikes to a neuron in close status, then these particular spikes will be lost). In the step t + d, the neuron fires and regains open status, so it can receive spikes (which can be used starting with the step t + d + 1, when the neuron can again apply rules). It is possible that p is associated with value 0. In this case, neuron σi consumes c spikes without emitting any spike. Spiking rule with p = 0 is also called forgetting rule, by which a pre-defined number of spikes can be removed out of the neuron. If E = ac, then the rule can be written in the simplified form ac → ap; d, and if d = 0, then the rule can be simply written as E/ac → ap.
Synapse creation and deletion rules are used to create and delete synapses during the computation. Synapse creation rule E′/ac′ → +(ap′, cre(i)) is applied as follows. If neuron σi has k′ spikes such that ak′ ∈ L(E′), k′ ≥ c′, then the synapse creation rule is applied with consuming c′ spikes, creating synapses to connect neuron σi to each neuron in cre(i) and emitting p′ spikes to each neuron in cre(i). If neuron σi has k″ spikes such that ak″ ∈ L(E″) and k″ ≥ c″, then synapse deletion rule E″/ac″ → −(λ, del(i)) is applied, removing c″ spikes from neuron σi and deleting all the synapses connecting neuron σi to the neurons from del(i). With the synapse creation and deletion rules, E′ and E″ are regular expressions over O = {a}, which regulate the application of synapse creation and deletion rules. This means that synapse creation and deletion rules can be used if and only if the neuron contain some particular numbers of spikes, i.e., the neuron is in some specific states. With the applications of synapse creation and deletion rules the system can dynamically rebuild its topological structure during the computation, which is herein defined as self-organization.
One neuron is specified as the input neuron, through which the system can read spikes from the environment. The output neuron has a synapse creation rule of the form E′/ac′ → +(ap′, {0}), where the environment is labelled by 0. By using the rule, the output neuron creates a synapse pointing to the environment, and then it can emit spikes into the environment along the created synapse.
For each time step, as long as there is one available rule in Ri, neuron σi must apply the rule. It is possible that there are more than one rule that can be used in a neuron at some moment, since spiking rules, synapse creation rules and synapse deletion rules may be associated with regular languages (according to their regular expressions). In this case, the neuron will non-deterministically uses one of the enabled rules. The system works sequentially in each neuron (at most one rule from each Ri can be used), and if parallelism is designed for the system, all the neurons at the same system level have at least one enabled rule activated.
The configuration of the system at certain moment is defined by three major factors which are the number of spikes contained in each neuron, the number of steps to wait until it becomes open and the current set of synapses. With the notion, the initial configuration of the system is 〈n1/0, n2/0, …, nm/0,  . Using the spiking, forgetting, synapse creation and deletion rules as described above, we can define transitions among configurations. Any sequence of transitions starting from the initial configuration is called a computation. A computation halts, also called successful, if it reaches a configuration where no rule can be applied in any neuron in the system. For each successful computation of the system, a computation result is generated, which is total the number of spikes sent to the environment by the output neuron.
. Using the spiking, forgetting, synapse creation and deletion rules as described above, we can define transitions among configurations. Any sequence of transitions starting from the initial configuration is called a computation. A computation halts, also called successful, if it reaches a configuration where no rule can be applied in any neuron in the system. For each successful computation of the system, a computation result is generated, which is total the number of spikes sent to the environment by the output neuron.
System Π generates a number n as follows. The computation of the system starts from the initial configuration and finally halts, emitting totally n spikes to the environment. The set of all numbers computed in this way by Π is denoted by Nall(Π) (the subscript all indicates that the computation result is the total number of spikes emitted into the environment by the system). System Π can also work in the accepting mode. A number n is read through input neurons from the environment in form of spike train 10n−11, which will be stored in a specified neuron σ1 in the form of f(n) spikes. If the computation eventually halts, then number n is said to be accepted by Π. The set of numbers accepted by Π is denoted by Nacc(Π).
It is denoted by NmSPSOall(creh, delg, ruler) (resp. NmSPSOacc(creh′, delg′, ruler′)) the family of sets of numbers computed (resp. accepted) by SN P systems with self-organization of degree m, where h (resp. h′) indicates the maximal number of synapses that can be created with using a synapse creation rule, g (resp. g′) is the maximal number of synapses that can be deleted with using a synapse deletion rule, r (resp. r′) is the maximal number of rules in each neuron, and the subscript all indicates the computation result is encoded by the number of spikes emitted into the environment (resp. the subscript acc indicates the system works in a accepting mode). If the parameters are not bounded, i.e., there is no limit imposed on them, then they are replaced with *.
In order to compute a function f : Nk → N by SN P systems with self-organization, k natural numbers n1, n2, …, nk are introduced in the system by reading from the environment a spike train (which is a binary sequence)  . The input neuron has a synapse pointing from the environment, by which the spikes can enter it. The input neuron reads a spike in each step corresponding to a digit 1 from the string z; otherwise, no spike is received. Note that exactly k + 1 spikes are introduced into the system through the input neuron, i.e., after the last spike, it is assumed that no further spike is coming to the input neuron. The output neuron has a synapse pointing to the environment from it, by which the spikes can be emitted to the environment. The result of the computation is the total number of spikes emitted into the environment by the output neuron, hence producing r spikes with r = f(n1, n2, …, nk).
. The input neuron has a synapse pointing from the environment, by which the spikes can enter it. The input neuron reads a spike in each step corresponding to a digit 1 from the string z; otherwise, no spike is received. Note that exactly k + 1 spikes are introduced into the system through the input neuron, i.e., after the last spike, it is assumed that no further spike is coming to the input neuron. The output neuron has a synapse pointing to the environment from it, by which the spikes can be emitted to the environment. The result of the computation is the total number of spikes emitted into the environment by the output neuron, hence producing r spikes with r = f(n1, n2, …, nk).
SN P systems with self-organization can be represented graphically, which is easier to understand than that in a symbolic way. A rounded rectangle with the initial number of spikes and rules is used to represent a neuron and a directed edge connecting two neurons represents a synapse.
In the following proofs, the notion of register machine is used. A register machine is a construct M = (m, H, l0, lh, I), where m is the number of registers, H is the set of instruction labels, l0 is the start label, lh is the halt label (assigned to instruction HALT), and I is the set of instructions; each label from H labels only one instruction from I, thus precisele following forms:
li: (ADD(r), lj, lk) (add 1 to register r and then go to one of the instructions with labels lj, lk),
li: (SUB(r), lj, lk) (if register r is non-zero, then subtract 1 from it, and go to the instruction with label lj; otherwise, go to the instruction with label lk),
lh: HALT (the halt instruction).
As number generator
A register machine M computes a number n as follows. It starts by using initial instruction l0 with all registers storing number 0. When it reaches halt instruction lh, the number stored in register 1 is called the number generated or computed by register machine M. The set of numbers generated or computed by register machine M is denoted by N(M). It is known that register machines compute all sets of numbers which are Turing computable, hence they characterize NRE, i.e., N(M) = NRE, where NRE is the family of Turing computable sets of numbers44.
Without loss of generality, it can be assumed that in the halting configuration, all registers different from the first one are empty, and that the first register is never decremented during the computation (i.e., its content is only added to). When the power of two number generating devices D1 and D2 are compared, number zero is ignored; that is, N(D1) = N(D2) if and only if N(D1) − {0} = N(D2) − {0} (this corresponds to the usual practice of ignoring the empty string in language and automata theory).
Theorem 4. N*SPSOall(cre*, del*, rule5) = NRE.
Proof
It only has to prove NRE⊆N*SPSOall (cre*, del*, rule5), since the converse inclusion is straightforward from the Turing-Church thesis (or it can be proved by the similar technical details in Section 8.1 in ref. 46, but is cumbersome). To achieve this, we use the characterization of NRE by means of register machines in the generative mode. Let us consider a register machine M = (m, H, l0, lh, I) defined above. It is assumed that register 1 of M is the output register, which is never decremented during the computation. For each register r of M, let sr be the number of instructions of the form li: (SUB(r), lj, lk), i.e., the number of SUB instructions acting on register r. If there is no such SUB instruction, then sr = 0, which is the case for the first register r = 1. In what follows, a specific SN P system with self-organization Π is constructed to simulate register machine M.
System Π consists of three modules–ADD, SUB and FIN modules. The ADD and SUB modules are used to simulate the operations of ADD and SUB instructions of M; and the FIN module is used to output a computation result.
In general, with any register r of M, a neuron σr in system Π is associated; the number stored in register r is encoded by the number of spikes in neuron σr. Specifically, if register r stores number n ≥ 0, then there are 5n spikes in neuron σr. For each label li of an instruction in M, a neuron  is associated. During the simulation, when neuron
is associated. During the simulation, when neuron  receives 6 spikes, it becomes active and starts to simulate instruction li: (OP(r), lj, lk) of M: the process starts with neuron
receives 6 spikes, it becomes active and starts to simulate instruction li: (OP(r), lj, lk) of M: the process starts with neuron  activated, operates on the number of spikes in neuron σr as requested by OP, then sends 6 spikes into neuron
activated, operates on the number of spikes in neuron σr as requested by OP, then sends 6 spikes into neuron  or
or  , which becomes active in this way. Since there is no initial synapse in system Π, some synapses are created to pass spikes to target neurons with synapse creation rules, after that the created synapses will be deleted when simulation completes by synapse deletion rules. When neuron
, which becomes active in this way. Since there is no initial synapse in system Π, some synapses are created to pass spikes to target neurons with synapse creation rules, after that the created synapses will be deleted when simulation completes by synapse deletion rules. When neuron  (associated with the halting instruction lh of M) is activated, a computation in M is completely simulated by system Π.
(associated with the halting instruction lh of M) is activated, a computation in M is completely simulated by system Π.
The following describes the works of ADD, SUB, and FIN modules of the SN P systems with self-organization.
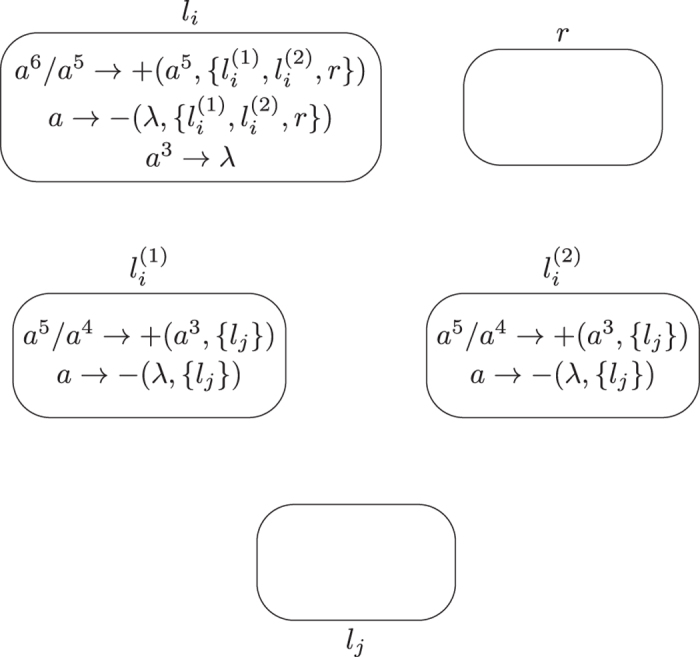
Module ADD (shown in Fig. 1): Simulating the ADD instruction li: (ADD(r), lj, lk).
Figure 1. Module ADD simulating the ADD instruction.
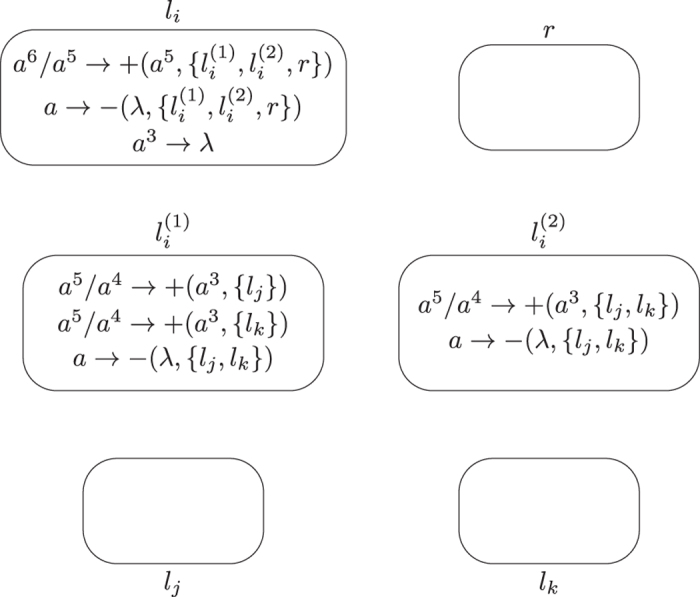
Initially, there is no synapse in system Π, and all the neurons have no spike with exception that neuron  has 6 spikes. This means system Π starts by simulating initial instruction l0. Let us assume that at step t, an instruction li: (ADD(r), lj, lk) has to be simulated, with 6 spikes present in neuron
has 6 spikes. This means system Π starts by simulating initial instruction l0. Let us assume that at step t, an instruction li: (ADD(r), lj, lk) has to be simulated, with 6 spikes present in neuron  (like
(like  in the initial configuration) and no spike in any other neurons, except in those neurons associated with registers.
in the initial configuration) and no spike in any other neurons, except in those neurons associated with registers.
At step t, neuron  has 6 spikes, and synapse creation rule
has 6 spikes, and synapse creation rule  is applied in
is applied in  , it generates three synapses connecting neuron
, it generates three synapses connecting neuron  to neurons
to neurons  ,
,  and σr. Meanwhile, it consumes 5 spikes (one spike remaining) and sends 5 spikes to each of neurons
and σr. Meanwhile, it consumes 5 spikes (one spike remaining) and sends 5 spikes to each of neurons  ,
,  and σr. The number of spikes in neuron σr is increased by 5, which simulates adding 1 to register r of M. At step t + 1, neuron
and σr. The number of spikes in neuron σr is increased by 5, which simulates adding 1 to register r of M. At step t + 1, neuron  deletes the three synapses created at step t by using rule
deletes the three synapses created at step t by using rule  . At the same moment, neuron
. At the same moment, neuron  uses synapse creation rule a5/a4 → + (a3, {lj, lk}), and creates two synapses to neurons
uses synapse creation rule a5/a4 → + (a3, {lj, lk}), and creates two synapses to neurons  and
and  , as well as sends 3 spikes to each of the two neurons. At step t + 2, neuron
, as well as sends 3 spikes to each of the two neurons. At step t + 2, neuron  deletes the two synapses by using synapse deletion rule a → − (λ, {lj, lk}). In neuron
deletes the two synapses by using synapse deletion rule a → − (λ, {lj, lk}). In neuron  , there are 5 spikes at step t + 1 such that both of synapse creation rules a5/a4 → + (a3, {lj}) and a5/a4 → + (a3, {lk}) are enabled, but only one of them is non-deterministically used.
, there are 5 spikes at step t + 1 such that both of synapse creation rules a5/a4 → + (a3, {lj}) and a5/a4 → + (a3, {lk}) are enabled, but only one of them is non-deterministically used.
– If rule a5/a4 → + (a3, {lj}) is chosen to use, neuron  creates a synapse and sends 3 spikes to neuron
creates a synapse and sends 3 spikes to neuron  . In this case, neuron
. In this case, neuron  accumulates 6 spikes, which means system Π starts to simulate instruction lj of M. One step later, with one spike inside neuron
accumulates 6 spikes, which means system Π starts to simulate instruction lj of M. One step later, with one spike inside neuron  uses rule a → − (λ, {lj, lk}) to delete the synapse to neuron
uses rule a → − (λ, {lj, lk}) to delete the synapse to neuron  , and neuron
, and neuron  removes the 3 spikes (from neuron
removes the 3 spikes (from neuron  ) by the forgetting rule a3 → λ.
) by the forgetting rule a3 → λ.
– If rule a5/a4 → + (a3, {lk}) is selected to apply, neuron  creates a synapse and sends 3 spikes to neuron
creates a synapse and sends 3 spikes to neuron  . Neuron
. Neuron  accumulates 6 spikes, which indicates system Π goes to simulate instruction lk of M. One step later, neuron
accumulates 6 spikes, which indicates system Π goes to simulate instruction lk of M. One step later, neuron  removes the 3 spikes by using forgetting rule a3 → λ, and the synapse from neuron
removes the 3 spikes by using forgetting rule a3 → λ, and the synapse from neuron  to
to  is deleted by using rule a → − (λ, {lj, lk}) in neuron
is deleted by using rule a → − (λ, {lj, lk}) in neuron  .
.
Therefore, from firing neuron  , system Π adds 5 spikes to neuron σr and non-deterministically activates one of the neurons
, system Π adds 5 spikes to neuron σr and non-deterministically activates one of the neurons  and
and  , which correctly simulates the ADD instruction li: (ADD(r), lj, lk). When the simulation of ADD instruction is completed, the ADD module returns to its initial topological structure, i.e., there is no synapse in the module. The dynamic transformation of topological structure and the numbers of spikes in neurons of ADD module during the ADD instruction simulation with neuron
, which correctly simulates the ADD instruction li: (ADD(r), lj, lk). When the simulation of ADD instruction is completed, the ADD module returns to its initial topological structure, i.e., there is no synapse in the module. The dynamic transformation of topological structure and the numbers of spikes in neurons of ADD module during the ADD instruction simulation with neuron  or
or  finally activated is shown in Figs 2 and 3. In the figures, the spiking rules are omitted for clear illustration, neurons are represented by circles with the number of spikes and directed edges is used to represent the synapses.
finally activated is shown in Figs 2 and 3. In the figures, the spiking rules are omitted for clear illustration, neurons are represented by circles with the number of spikes and directed edges is used to represent the synapses.
Figure 2. The dynamic transformation of topological structure and the numbers of spikes in neurons of ADD module during the ADD instruction simulation with neuron  finally activated.
finally activated.

Figure 3. The dynamic transformation of topological structure and the numbers of spikes in neurons of ADD module during the ADD instruction simulation with neuron finally activated.
finally activated.

Module SUB (shown in Fig. 4): Simulating the SUB instruction li: (SUB(r), lj, lk).
Figure 4. Module SUB simulating the SUB instruction.
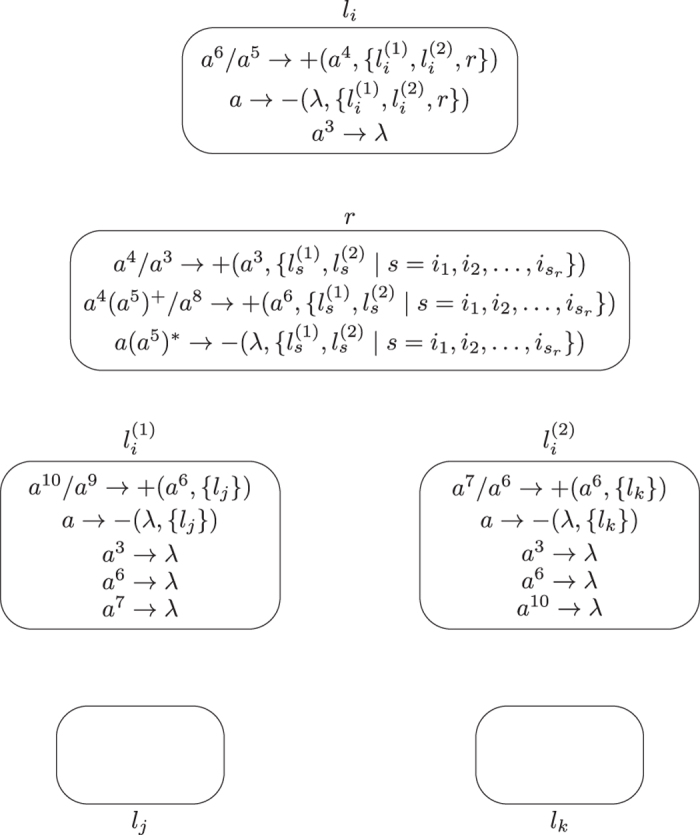
Given starting time stamp t, system Π simulates a SUB instruction li: (SUB(r), lj, lk). Let sr be the number of SUB instructions acting on register r and the set of labels of instructions acting on register r be  . Obviously, it holds
. Obviously, it holds  .
.
At step t, neuron  has 6 spikes, and becomes active by using synapse creation rule
has 6 spikes, and becomes active by using synapse creation rule  , creating synapses and sending 4 spikes to each of neurons
, creating synapses and sending 4 spikes to each of neurons  ,
,  and σr. With 4 spikes inside, neurons
and σr. With 4 spikes inside, neurons  and
and  keep inactive at step t + 1 because no rule can be used. In neuron σr, it has the following two cases.
keep inactive at step t + 1 because no rule can be used. In neuron σr, it has the following two cases.
– If neuron σr has 5n (n > 0) spikes (corresponding to the fact that the number stored in register r is n, and n > 0), then by receiving 4 spikes from neuron  , it accumulates 5n + 4 spikes and becomes active by using rule
, it accumulates 5n + 4 spikes and becomes active by using rule  at step t + 1. It creates a synapse to each of neurons
at step t + 1. It creates a synapse to each of neurons  and
and  with
with  and sending 6 spikes to the neurons. By consuming 8 spikes, the number of spikes in neuron σr becomes 5n + 4 − 8 = 5(n − 1) + 1 (n ≥ 0) such that rule
and sending 6 spikes to the neurons. By consuming 8 spikes, the number of spikes in neuron σr becomes 5n + 4 − 8 = 5(n − 1) + 1 (n ≥ 0) such that rule  is enabled and applied at step t + 2. With application of the rule, neuron σr removes the synapses from neuron σr to neurons
is enabled and applied at step t + 2. With application of the rule, neuron σr removes the synapses from neuron σr to neurons  and
and  ,
,  . Meanwhile, neurons
. Meanwhile, neurons  and
and  with s ≠ i remove the 6 spikes by using forgetting rule a6 → λ, and neuron
with s ≠ i remove the 6 spikes by using forgetting rule a6 → λ, and neuron  removes the 10 spikes by forgetting rule a10 → λ. Neuron
removes the 10 spikes by forgetting rule a10 → λ. Neuron  accumulates 10 spikes (4 spikes from neuron
accumulates 10 spikes (4 spikes from neuron  and 6 spikes from neuron σr), and rule a10/a9 → + (a6, {lj}) is applied at step t + 2, creating a synapse and sending 6 spikes to neuron
and 6 spikes from neuron σr), and rule a10/a9 → + (a6, {lj}) is applied at step t + 2, creating a synapse and sending 6 spikes to neuron  . In this case, neuron
. In this case, neuron  receives 6 spikes, which means system Π starts to simulate instruction lj of M. One step later, the synapse from neuron
receives 6 spikes, which means system Π starts to simulate instruction lj of M. One step later, the synapse from neuron  to neuron
to neuron  is deleted by using synapse deletion rule a → − (λ, {lj}).
is deleted by using synapse deletion rule a → − (λ, {lj}).
– If neuron σr has no spike (corresponding to the fact that the number stored in register r is 0), then after receiving 4 spikes from neuron  , it has 4 spikes and rule
, it has 4 spikes and rule  is used, creating a synapse to each of neurons
is used, creating a synapse to each of neurons  and
and  with
with  and sending 3 spikes to the neurons. Neuron σr remains one spike, and synapse deletion rule
and sending 3 spikes to the neurons. Neuron σr remains one spike, and synapse deletion rule  is applied at step t + 2, removing the synapses from neuron σr to neurons
is applied at step t + 2, removing the synapses from neuron σr to neurons  and
and  ,
,  . At the same moment, neurons
. At the same moment, neurons  and
and  with s ≠ i remove the 3 spikes by using forgetting rule a3 → λ, and neuron
with s ≠ i remove the 3 spikes by using forgetting rule a3 → λ, and neuron  removes 7 spikes using spiking rule a7 → λ. Having 7 spikes, Neuron
removes 7 spikes using spiking rule a7 → λ. Having 7 spikes, Neuron  becomes active by using rule a7/a6 → + (a6, {lk}) at step t + 2, creating a synapse to neuron
becomes active by using rule a7/a6 → + (a6, {lk}) at step t + 2, creating a synapse to neuron  and sending 6 spikes to neuron
and sending 6 spikes to neuron  . In this case, neuron
. In this case, neuron  receives 6 spikes, which means system Π starts to simulate instruction lk of M. At step t + 3, neuron
receives 6 spikes, which means system Π starts to simulate instruction lk of M. At step t + 3, neuron  uses rule a → − (λ, {lk}) to remove the synapse to neuron
uses rule a → − (λ, {lk}) to remove the synapse to neuron  .
.
The simulation of SUB instruction performs correctly: System Π starts from  having 6 spikes and becoming active, and ends in neuron
having 6 spikes and becoming active, and ends in neuron  receiving 6 spikes (if the number stored in register r is great than 0 and decreased by one), or in neuron
receiving 6 spikes (if the number stored in register r is great than 0 and decreased by one), or in neuron  receiving 6 spikes (if the number stored in register r is 0).
receiving 6 spikes (if the number stored in register r is 0).
When the simulation of SUB instruction is completed, the SUB module returns to its initial topological structure, i.e., there is no synapse in the module. The dynamic transformation of topological structure and the numbers of spikes in involved neurons in the SUB instruction simulation with neuron  (resp. neuron
(resp. neuron  ) finally activated is shown in Fig. 5 (resp. Fig. 6).
) finally activated is shown in Fig. 5 (resp. Fig. 6).
Figure 5. The dynamic transformation of topological structure and the numbers of spikes in involved neurons in the SUB instruction simulation with neuron  finally activated.
finally activated.

Figure 6. The dynamic transformation of topological structure and the numbers of spikes in involved neurons in the SUB instruction simulation with neuron finally activated.
finally activated.

Module FIN (shown in Fig. 7) – outputting the result of computation.
Figure 7. Outputting the computation result.
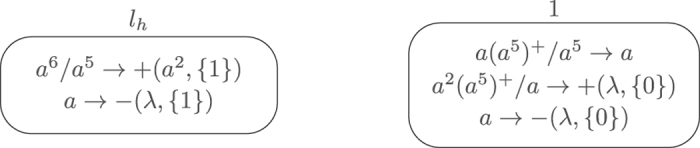
Assume that at step t the computation in M halts, i.e., the halting instruction is reached. In this case, neuron  in Π receives 6 spikes. At that moment, neuron σ1 contains 5n spikes, for the number n ≥ 1 stored in register 1 of M. With 6 spikes inside, neuron
in Π receives 6 spikes. At that moment, neuron σ1 contains 5n spikes, for the number n ≥ 1 stored in register 1 of M. With 6 spikes inside, neuron  becomes active by using rule a6/a5 → +(a2, {1}), creating a synapse to neuron σ1 and sending 2 spikes to neuron σ1. Neuron
becomes active by using rule a6/a5 → +(a2, {1}), creating a synapse to neuron σ1 and sending 2 spikes to neuron σ1. Neuron  ends with one spike, and rule a → −(λ, {1}) is used, removing the synapse to neuron σ1 one step later.
ends with one spike, and rule a → −(λ, {1}) is used, removing the synapse to neuron σ1 one step later.
After neuron σ1 receives the 2 spikes from neuron  , the number of spikes in neuron σ1 becomes 5n + 2 and rule a2(a5)+/a → +(λ, {0}) is enabled and applied at step t + 2. By using the rule, neuron σ1 consumes one spike and creates a synapse to the environment. Neuron σ1 contains 5n + 1 spikes such that spiking rule a(a5)+/a5 → a is used, consuming 5 spikes and emitting one spike to the environment at step t + 3. Note that the number of spikes in neuron σ1 becomes 5(n − 1) + 1. So, if the number of spikes in neuron σ1 is not one, then neuron σ1 will fire again in the next step sending one spike into the environment. In this way, neuron σ1 can fire for n times, i.e., until the number of spikes in neuron σ1 reaches one. For each time when neuron σ1 fires, it sends one spike into the environment. So, in total, neuron σ1 sends n spikes into the environment, which is exactly the number stored in register 1 of M at the moment when the computation of M halts. When neuron σ1 has one spike, rule a → −(λ, {0}) is used to remove the synapse from neuron σ1 to the environment, and system Π eventually halts.
, the number of spikes in neuron σ1 becomes 5n + 2 and rule a2(a5)+/a → +(λ, {0}) is enabled and applied at step t + 2. By using the rule, neuron σ1 consumes one spike and creates a synapse to the environment. Neuron σ1 contains 5n + 1 spikes such that spiking rule a(a5)+/a5 → a is used, consuming 5 spikes and emitting one spike to the environment at step t + 3. Note that the number of spikes in neuron σ1 becomes 5(n − 1) + 1. So, if the number of spikes in neuron σ1 is not one, then neuron σ1 will fire again in the next step sending one spike into the environment. In this way, neuron σ1 can fire for n times, i.e., until the number of spikes in neuron σ1 reaches one. For each time when neuron σ1 fires, it sends one spike into the environment. So, in total, neuron σ1 sends n spikes into the environment, which is exactly the number stored in register 1 of M at the moment when the computation of M halts. When neuron σ1 has one spike, rule a → −(λ, {0}) is used to remove the synapse from neuron σ1 to the environment, and system Π eventually halts.
The dynamic transformation of topological structure of the FIN module and the numbers of spikes in the neurons of FIN module and in the environment are shown in Fig. 8.
Figure 8. The dynamic transformation of topological structure of the FIN module and the numbers of spikes in the neurons of FIN module and the environment.

Based on the description of the work of system Π above, the register machine M is correctly simulated by system Π, i.e., N(M) = Nall(Π). We can check that each neuron in system Π has at most three rules, and no limit is imposed on the numbers of neurons and the synapses that can be created (or deleted) by using one synapse creation (or deletion) rule. Therefore, it concludes N*SPSOall(cre*, del*, rule5) = NRE.
This concludes the proof.
As number acceptor
Register machine can work in the accepting mode. Number n is accepted by register machine M′ as follows. Initially, number n is stored in the first register of M′ and all the other registers are empty. If the computation starting in this configuration eventually halts, then the number n is said to be accepted by register machine M′. The set of numbers accepted by register machine M′ is denoted by Nacc(M′). It is known that all the sets of numbers in NRE can be accepted by register machine M′, even using the deterministic register machine; i.e. the machine with the ADD instructions of the form li: (ADD(r), lj, lk) where lj = lk (in this case, the instruction is written in the form li: (ADD(r), lj))44.
Theorem 5. N*SPSOacc(cre*, del*, rule5) = NRE.
Proof
It only has to prove NRE ⊆ N*SPSOacc (cre*, del*, rule5), since the converse inclusion is straightforward from the Turing-Church thesis. In what follows, an SN P system Π′ with self-organization working in accepting mode is constructed to simulate a deterministic register machine M′ = (m, H, l0, lh, I) working in the acceptive mode. Actually, the proof is given by modifying the proof of Theorem 4.
Each register r of M′ is associated with a neuron σr in system Π′, and for each instruction li of M′ a neuron  is associated. A number n stored in register r is represented by 5n spikes in neuron σr.
is associated. A number n stored in register r is represented by 5n spikes in neuron σr.
The system Π′ consists of an INPUT module, deterministic ADD and SUB modules. The INPUT module is shown in Fig. 9, where all neurons are initially empty with the exception that input neuron σin has 8 spikes. Spike train 10n−11 is introduced into the system through input neuron σin, where the internal between the two spikes in the spike train is (n + 1) − 1 = n, which indicates that number n is going to be accepted by system Π′.
Figure 9. The INPUT module of system Π′.
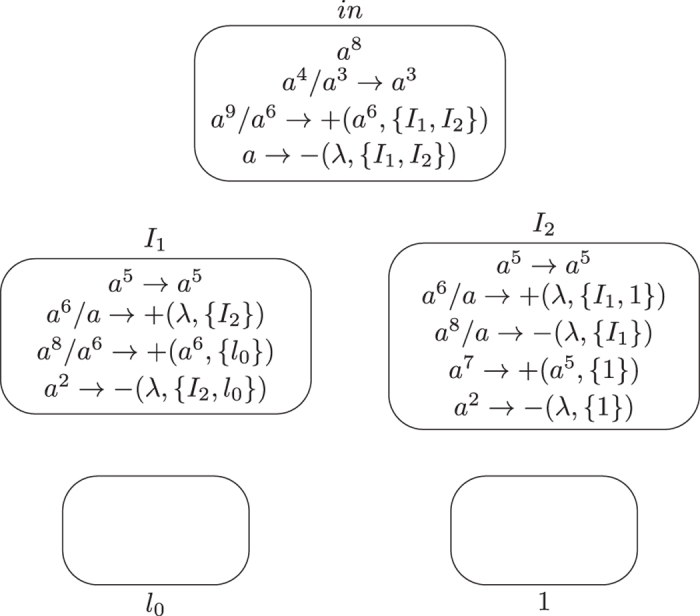
Assuming at step t neuron σin receives the first spike. At step t + 1, neuron σin contains 9 spikes, and rule a9/a6 → +(a6, {I1, I2}) is used, creating a synapse from neuron σin to neurons  and
and  . Meanwhile, neuron σin sends 6 spikes to the two neurons. In neuron σin, 6 spikes are consumed and 3 spikes remain. With 6 spikes inside, neurons
. Meanwhile, neuron σin sends 6 spikes to the two neurons. In neuron σin, 6 spikes are consumed and 3 spikes remain. With 6 spikes inside, neurons  and
and  become active at step t + 2. Neuron
become active at step t + 2. Neuron  uses rule a6/a → +(λ, {I2}) to create a synapse to neuron
uses rule a6/a → +(λ, {I2}) to create a synapse to neuron  ; and neuron
; and neuron  uses rule a6/a → +(λ, {I1, 1}) to create a synapse to each of neurons
uses rule a6/a → +(λ, {I1, 1}) to create a synapse to each of neurons  and σ1. Each of neurons
and σ1. Each of neurons  and
and  has 5 spikes left. From step t + 3 on, neurons
has 5 spikes left. From step t + 3 on, neurons  and
and  fire and begin to exchange 5 spikes between them. In this way, neuron σ1 receives 5 spikes from neurons
fire and begin to exchange 5 spikes between them. In this way, neuron σ1 receives 5 spikes from neurons  at each step.
at each step.
At step t + n, neuron σin receives the second spike from the environment, accumulating 4 spikes inside. At step t + n + 1, neuron σin fires for the second time by using spiking rule a4/a3 → a3, sending 3 spikes to neurons  and
and  . Each of neurons
. Each of neurons  and
and  accumulates 8 spikes. At step t + n + 2, neuron
accumulates 8 spikes. At step t + n + 2, neuron  uses synapse creation rule a8/a6 → +(a6, {l0}), creating a synapse to neuron
uses synapse creation rule a8/a6 → +(a6, {l0}), creating a synapse to neuron  and sending 6 spikes to neuron
and sending 6 spikes to neuron  . This means that system Π′ starts to simulate the initial instruction l0 of register machine M′. Meanwhile, neuron
. This means that system Π′ starts to simulate the initial instruction l0 of register machine M′. Meanwhile, neuron  uses synapse deletion rule a8/a → −(λ, {I1}), removing the synapse from neuron .. to neuron
uses synapse deletion rule a8/a → −(λ, {I1}), removing the synapse from neuron .. to neuron  . In the next step, neuron
. In the next step, neuron  creates a synapse to neuron σ1 and sends 5 spikes to neuron σ1 by using rule a7 → +(a5, {1}).
creates a synapse to neuron σ1 and sends 5 spikes to neuron σ1 by using rule a7 → +(a5, {1}).
From step t + 3 to t + n + 1, neuron σ1 receives 5 spikes in each step from neuron  , thus in total accumulating 5(n − 1) spikes. Neuron σ1 receives no spike at step t + n + 2, and gets 5 spikes from neuron
, thus in total accumulating 5(n − 1) spikes. Neuron σ1 receives no spike at step t + n + 2, and gets 5 spikes from neuron  at step t + n + 3. After that, no more spikes are sent to neuron
at step t + n + 3. After that, no more spikes are sent to neuron  . Neuron σ1 contains 5n spikes, which indicates the number to be accepted by register machine M′ is n. At step t + n + 4, neuron
. Neuron σ1 contains 5n spikes, which indicates the number to be accepted by register machine M′ is n. At step t + n + 4, neuron  uses rule a2 → −(λ, {1}), deleting the synapse to neuron σ1.
uses rule a2 → −(λ, {1}), deleting the synapse to neuron σ1.
The dynamic transformation of topological structure of INPUT module and the numbers of spikes in the neurons of INPUT module are shown in Fig. 10.
Figure 10. The dynamic transformation of topological structure of INPUT module and the numbers of spikes in the neurons of INPUT module.

The deterministic ADD module is shown in Fig. 11, whose function is rather clear. By receiving 6 spikes, neuron  becomes active, creating a synapse and sending 5 spikes to each of neurons σr,
becomes active, creating a synapse and sending 5 spikes to each of neurons σr,  and
and  . The number of spikes in neuron σr is increased by 5, which simulates the number stored in register 1 is increased by one. In the next step, neuron
. The number of spikes in neuron σr is increased by 5, which simulates the number stored in register 1 is increased by one. In the next step, neuron  uses rule
uses rule  , removing the synapses from neuron
, removing the synapses from neuron  to neurons σr,
to neurons σr,  and
and  . In neurons
. In neurons  and
and  , there are 5 spikes. The two neurons become active by using rule a5/a4 → +(a3, {lj}). Each of them creates a synapse to neuron
, there are 5 spikes. The two neurons become active by using rule a5/a4 → +(a3, {lj}). Each of them creates a synapse to neuron  and emits 3 spikes to neuron
and emits 3 spikes to neuron  . In this way, neuron
. In this way, neuron  accumulates 6 spikes inside, which means the system Π′ goes to simulate instruction lj of M′. The synapses from neuron
accumulates 6 spikes inside, which means the system Π′ goes to simulate instruction lj of M′. The synapses from neuron  and
and  to neuron
to neuron  will be removed by using synapse deletion rule a → −(λ, {lj}) in neurons
will be removed by using synapse deletion rule a → −(λ, {lj}) in neurons  and
and  .
.
Figure 11. The deterministic ADD module of system Π′.
Module SUB remains unchanged, as shown in Fig. 4. Module FIN is removed, with neuron  remaining in the system, but having no rule inside. When neuron
remaining in the system, but having no rule inside. When neuron  receives 6 spikes, it means that the computation of register machine M′ reaches instruction lh and stops. Having 6 spikes inside, neuron
receives 6 spikes, it means that the computation of register machine M′ reaches instruction lh and stops. Having 6 spikes inside, neuron  cannot become active for no rule can be used. In this way, the work of system Π′ halts.
cannot become active for no rule can be used. In this way, the work of system Π′ halts.
Based on the description of the implementation of system Π′ above, it is clear that the register machine M′ in acceptive mode is correctly simulated by the system Π′ working in acceptive mode, i.e., Nacc(M′) = Nacc(Π′).
We can check that each neuron in system Π′ has at most five rules, and no limit is imposed on the numbers of neurons and the synapses that can be created (or deleted) with using one synapse creation (or deletion) rule. Therefore, it concludes N*SPSOacc(cre*, del*, rule5) = NRE.
As function computing device
A register machine M can compute a function f : Nk → N as follows: the arguments are introduced in special registers r1, r2, …, rk (without loss of the generality, it is assumed that the first k registers are used). The computation starts with the initial instruction l0. if the register machine halts, i.e., reaches HALT instruction lh, the value of the function is placed in another specified register, labelled by rt, with all registers different from rt storing number 0. The partial function computed by a register machine M in this way is denoted by M(n1, n2, …, nk). All Turing computable functions can be computed by register machine in this way.
Several universal register machines for computing functions were defined. Let (φ0, φ1,…) be a fixed admissible enumeration of the unary partial recursive functions. A register machine Mu is said to be universal if there is a recursive function g such that for all natural numbers x, y we have φx(y) = Mu(g(x), y). As addressed by Minsky, universal register machine can compute any φx(y) by inputting a couple of numbers g(x) and y in registers 1 and 2, and the result can be obtained in register 047.
In the following proof of universality, a specific universal register machine Mu from47 is used, the machine Mu = (8, H, l0, lh, I) presented in Fig. 12. In this universal register machine Mu, there are 8 registers (numbered from 0 to 7) and 23 instructions, and the last instruction is the halting one. As described above, the input numbers (the “code” of the partial recursive function to compute and the argument for this function) are introduced in registers 1 and 2, and the result is outputted in register 0 when the machine Mu halts.
Figure 12. The universal register machine Mu from47.
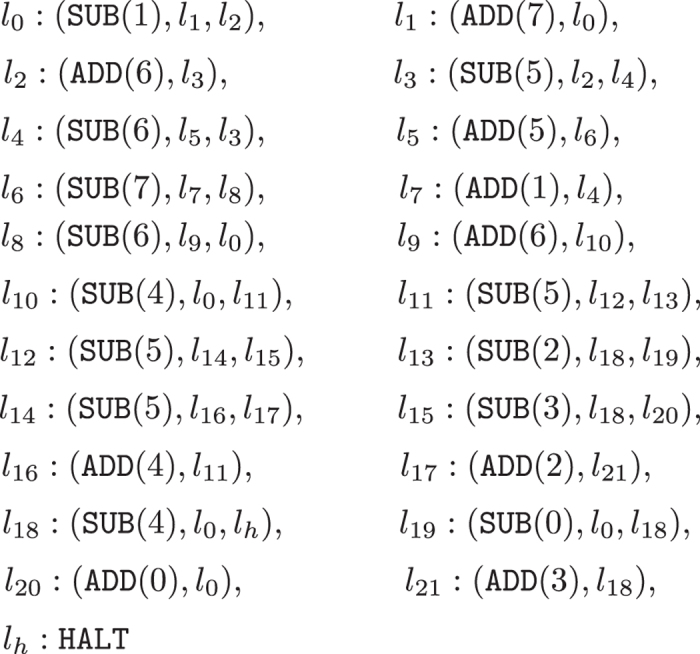
A modification is necessary to be made in Mu, because the subtraction operation in the register where the result is placed is not allowed in the construction of the previous Theorems, but register 0 of Mu is subject of such operations. That is why an extra register is needed - labeled with 8 - and the halt instruction lh of Mu should be replaced by the following instructions:
 |
Therefore, the modified universal register machine  has 9 registers, 24 ADD and SUB instructions, and 25 labels. The result of a computation of
has 9 registers, 24 ADD and SUB instructions, and 25 labels. The result of a computation of  is stored in register 8
is stored in register 8
Theorem 6 There is a universal SN P system with self-organization having 87 neurons for computing functions.
Proof
An SN P system with self-organization Π″ is constructed to simulate the computation of the universal register machine  . Specifically, the system Π″ consists of deterministic ADD modules, SUB modules, as well as an INPUT module and an OUTPUT module. The deterministic ADD module shown in Fig. 11 and SUB module shown in Fig. 4 can be used here to simulate the deterministic ADD instruction and SUB instruction of
. Specifically, the system Π″ consists of deterministic ADD modules, SUB modules, as well as an INPUT module and an OUTPUT module. The deterministic ADD module shown in Fig. 11 and SUB module shown in Fig. 4 can be used here to simulate the deterministic ADD instruction and SUB instruction of  . The INPUT module introduces the necessary spikes into the system by reading a spike train from the environment, and the OUTPUT module outputs the computation result.
. The INPUT module introduces the necessary spikes into the system by reading a spike train from the environment, and the OUTPUT module outputs the computation result.
With each register r of  , a neuron σr in system Π″ is associated; the number stored in register r is encoded by the number of spikes in neuron σr. If register r holds the number n ≥ 0, then neuron σr contains 5n spikes. With each instruction li in .., a neuron
, a neuron σr in system Π″ is associated; the number stored in register r is encoded by the number of spikes in neuron σr. If register r holds the number n ≥ 0, then neuron σr contains 5n spikes. With each instruction li in .., a neuron  in system Π″ is associated. If neuron
in system Π″ is associated. If neuron  has 6 spikes inside, it becomes active and starts to simulate the instruction li. When neuron
has 6 spikes inside, it becomes active and starts to simulate the instruction li. When neuron  (associated with the label l′h of the halting instruction of
(associated with the label l′h of the halting instruction of  ) receives 6 spikes, the computation in
) receives 6 spikes, the computation in  is completely simulated by the system Π″; the number of spikes emitted into the environment from the output neuron, i.e., neuron σ8, corresponds to the result computed by
is completely simulated by the system Π″; the number of spikes emitted into the environment from the output neuron, i.e., neuron σ8, corresponds to the result computed by  (stored in register 8).
(stored in register 8).
The tasks of loading 5g(x) spikes in neuron σ1 and 5y spikes in neuron σ2 by reading the spike train 10g(x)−110y−11 through input neuron σin can be carried out by the INPUT module shown in Fig. 13.
Figure 13. The INPUT module of system Π″.

Initially, all the neurons contain no spike inside, with the exception that neuron σin has 15 spikes. It is assumed at step t neuron σin reads the first spike from the environment. With 16 spikes inside, neuron σin becomes active by using rule a16/a6 → +(a6, {I1, I2}) at step t + 1. It creates a synapse and sends 6 spikes to each of neurons  and
and  . Subsequently, neuron σin keeps inactive (for no rule can be used) until the second spike arrives at step t + g(x). Neuron
. Subsequently, neuron σin keeps inactive (for no rule can be used) until the second spike arrives at step t + g(x). Neuron  has 6 spikes and uses rule a6/a → +(λ, {I2, 1}) at step t + 2 it creates a synapse to neurons
has 6 spikes and uses rule a6/a → +(λ, {I2, 1}) at step t + 2 it creates a synapse to neurons  and σ1 and sends 5 spikes to each of the two neurons. Meanwhile, neuron
and σ1 and sends 5 spikes to each of the two neurons. Meanwhile, neuron  creates a synapse to neuron
creates a synapse to neuron  and sends 5 spikes to it. From step t + 3 on, neuron
and sends 5 spikes to it. From step t + 3 on, neuron  sends 5 spikes to neuron
sends 5 spikes to neuron  and exchanges 5 spikes with neuron
and exchanges 5 spikes with neuron  in each step.
in each step.
At step t + g(x), neuron σin receives the second spike from the environment. By then it accumulates 11 spikes inside. At step t + g(x) + 1, neuron σin fires by using spiking rule a11/a3 → a3, and sends 3 spikes to neurons  and
and  . Each of neurons
. Each of neurons  and .. contains 8 spike, which will be remained in σin.
and .. contains 8 spike, which will be remained in σin.
At step t + g(x) + 2, neuron  applies synapse deletion rule a8/a → −(λ, {I1}) and removes the synapse to neuron
applies synapse deletion rule a8/a → −(λ, {I1}) and removes the synapse to neuron  , meanwhile neuron
, meanwhile neuron  removes the synapse to neuron
removes the synapse to neuron  . The two neurons stop to exchange spikes with each other. At step t + g(x) + 3, neuron
. The two neurons stop to exchange spikes with each other. At step t + g(x) + 3, neuron  has 7 spikes and fires by using spiking rule a7/a5 → a5, and sends 5 spikes to neuron σ1. In the next step, neuron
has 7 spikes and fires by using spiking rule a7/a5 → a5, and sends 5 spikes to neuron σ1. In the next step, neuron  removes the synapse to neuron σ1, and cannot send spikes to neuron σ1.
removes the synapse to neuron σ1, and cannot send spikes to neuron σ1.
In general, in each step from step t + 3 to t + g(x) +1, neuron σ1 receives 5 spikes from neuron  , in total receiving 5(g(x) − 1) spikes; at step t + g(x) + 2, no spike arriving in neuron σ1, and at step t + g(x) + 3, 5 spikes reaching neuron σ1. In this way, neuron σ1 accumulates 5g(x) spikes, which simulates number g(x) is stored in register 1 of
, in total receiving 5(g(x) − 1) spikes; at step t + g(x) + 2, no spike arriving in neuron σ1, and at step t + g(x) + 3, 5 spikes reaching neuron σ1. In this way, neuron σ1 accumulates 5g(x) spikes, which simulates number g(x) is stored in register 1 of  .
.
At step t + g(x) + 2, neuron σin contains 8 spikes such that rule a8/a6 → + (a6, {I3, I4}) is used, creating a synapse and sends 6 spikes to each of neurons  and
and  . At step t + g(x) + 3, neurons
. At step t + g(x) + 3, neurons  and
and  create synapses to each other, meanwhile neuron
create synapses to each other, meanwhile neuron  creates a synapse to neuron σ2. From step t + g(x) + 4 on, neuron
creates a synapse to neuron σ2. From step t + g(x) + 4 on, neuron  begins to exchange 5 spikes with
begins to exchange 5 spikes with  and send 5 spikes to neuron σ2 in each step. At step t + g(x) + y, neuron σin receives the third spike from the environment, accumulating 3 spikes inside. One step later, it fires by using spiking rule a3/a2 → a2, sending 2 spikes to neurons
and send 5 spikes to neuron σ2 in each step. At step t + g(x) + y, neuron σin receives the third spike from the environment, accumulating 3 spikes inside. One step later, it fires by using spiking rule a3/a2 → a2, sending 2 spikes to neurons  ,
,  ,
,  and
and  . With 2 spikes inside, neuron σ1 removes its synapse to neuron σ1 by rule a2 → −(λ, {1}); while neuron
. With 2 spikes inside, neuron σ1 removes its synapse to neuron σ1 by rule a2 → −(λ, {1}); while neuron  forgets the two spikes by forgetting rule a2 → λ. By receiving 2 spikes from neuron σin, neurons
forgets the two spikes by forgetting rule a2 → λ. By receiving 2 spikes from neuron σin, neurons  and
and  contain 7 spikes. At step t + g(x) + y + 2, neuron
contain 7 spikes. At step t + g(x) + y + 2, neuron  fires by using rule a7/a3 → a3 and sends 3 spikes to neurons σ2 and
fires by using rule a7/a3 → a3 and sends 3 spikes to neurons σ2 and  . The number of spikes in neuron σ2 is 5(y − 1) + 3. Neuron
. The number of spikes in neuron σ2 is 5(y − 1) + 3. Neuron  consumes 6 spikes, creates a synapse and sends 6 spikes to neuron
consumes 6 spikes, creates a synapse and sends 6 spikes to neuron  . This means system Π'' starts to simulate the initial instruction l0 of
. This means system Π'' starts to simulate the initial instruction l0 of  .
.
At step t + g(x) + y + 3, neuron  has 4 spikes, and it becomes active by rule a4/a → −(λ, {I4}), and removes its synapse to neuron
has 4 spikes, and it becomes active by rule a4/a → −(λ, {I4}), and removes its synapse to neuron  and ends with 3 spikes. In the next step, neuron
and ends with 3 spikes. In the next step, neuron  fires by using spiking rule a3/a2 → a2, emitting 2 spikes to neuron σ2. In this way, the number of spikes in neuron σ2 becomes 5(y − 1) + 3 + 2 = 5y, which indicates number y is stored in register 2 of
fires by using spiking rule a3/a2 → a2, emitting 2 spikes to neuron σ2. In this way, the number of spikes in neuron σ2 becomes 5(y − 1) + 3 + 2 = 5y, which indicates number y is stored in register 2 of  .
.
The deterministic ADD module shown in Fig. 11 and SUB module shown in Fig. 4 can be used to simulate ADD and SUB instructions of  . The FIN module shown in Fig. 7 can be used to output the computation result with changing neuron σ1 into σ8.
. The FIN module shown in Fig. 7 can be used to output the computation result with changing neuron σ1 into σ8.
Until now, we have used
9 neurons for 9 registers,
25 neurons for 25 labels,
20 neurons for 10 ADD instructions,
28 neurons for 14 SUB instruction,
5 additional neurons in the INPUT module,
which comes to a total of 87 neurons.
This concludes the proof.
Discussion and Future Works
In this work, a novel variant of SN P systems, namely SN P systems with self-organization, is introduced. As results, it is proven that the systems are Turing universal, i.e., they can compute and accept the family of sets of Turing computable natural numbers. With 87 neurons, the system can compute any Turing computable recursive function, thus achieving Turing universality.
There has been a research focus on the construction of small universal SN P with less computing resource, i.e. less number of neuron in use17,48,49,50,51,52. It is of interest that whether we can reduce the number of neurons in universal SN P systems with self-organization as function computing devices. A possible way is to construct ADD-ADD, ADD-SUB and SUB-ADD modules to perform particular consecutive ADD-ADD, ADD-SUB, and SUB-ADD instructions of  .
.
SN P systems with learning function/capabiliy is a promising direction. Learning strategies and feedback mechanism have been intensively studied and investigated in conventional artificial neural networks. It is worthy to look into these techniques and transplant these ideas into SN P systems with self-organization.
In research of using artificial neural networks to recognize digital English letters, database MNIST (Mixed National Institute of Standards and Technology database) is widely used for training various letter recognition systems53, and for training and testing in the field of machine learning54. For further research, SN P systems with self-organization may be used to recognize handwritten digits letters and other possible pattern recognition problems. Since the data structure of SN P systems is binary sequences, an extra task of transmitting letters or pictures into binary sequences should be addressed. A possible way is transmitting digital numbers of pixels of pictures to binary form. Also, local binary pattern method, can be used to transmit pictures to binary forms.
Bioinformatics is s an interdisciplinary field that develops methods and software tools for understanding biological data55. Artificial intelligence based methods and data mining strategy have been used in processing biological data, see e.g.56,57,58,59,60,61,62, it is worthy to processing biological data by SN P systems, such as DNA motif finding63,64, nuclear export signal identification65,66.
Additional Information
How to cite this article: Wang, X. et al. On the Computational Power of Spiking Neural P Systems with Self-Organization. Sci. Rep. 6, 27624; doi: 10.1038/srep27624 (2016).
Acknowledgments
The research is under the auspices of National Natural Science Foundation of China (Nos 41276135, 31172010, 61272093, 61320106005, 61402187, 61502535, 61572522 and 61572523), Program for New Century Excellent Talents in University (NCET-13-1031), 863 Program (2015AA020925), and Fundamental Research Funds for the Central Universities (15CX05015A).
Footnotes
Author Contributions T.S. and X.W. contributed the main idea, X.W. and F.G. performed the analysis and theoretical proofs, P.Z. and X.W. wrote the paper. All authors reviewed the manuscript.
References
- Chen X., Perez-Jimenez M. J., Valenciacabrera L., Wang B. & Zeng X. Computing with viruses. Theor. Comput. Sci. 623, 146–159 (2016). [Google Scholar]
- Zhang X., Tian Y. & Jin Y. A knee point-driven evolutionary algorithm for many-objective optimization. IEEE T. Evolut. Compu. 16, 35–41 (2015). [Google Scholar]
- Zhang X., Tian Y., Cheng R. & Jin Y. An efficient approach to nondominated sorting for evolutionary multiobjective optimization. IEEE T. Evolut. Compu. 19, 201–213 (2015). [Google Scholar]
- Gerstner W. & Kistler W. M. Spiking neuron models: single neurons, populations, plasticity (Cambridge university press, 2002). [Google Scholar]
- Hagan M. T., Demuth H. B. & Beale M. H. Neural network design (Pws Publishing: Boston, 1996). [Google Scholar]
- Ghosh-Dastidar S. & Adeli H. Spiking neural networks. Int. J. Neural Syst. 19, 295–308 (2009). [DOI] [PubMed] [Google Scholar]
- Ionescu M., Păun Gh. & Yokomori T. Spiking neural P systems. Fund. Inform. 71, 279–308 (2006). [Google Scholar]
- Maass W. Networks of spiking neurons: the third generation of neural network models. Neural Networks 10, 1659–1671 (1997). [Google Scholar]
- Pan L. & Păun Gh. Spiking neural P systems: an improved normal form. Theor. Comput. Sci. 411, 906–918 (2010). [Google Scholar]
- Song T. & Pan L. Spiking neural P systems with rules on synapses working in maximum spiking strategy. IEEE T. Nanobiosci. 14, 465–477 (2015). [DOI] [PubMed] [Google Scholar]
- Cavaliere M. et al. Asynchronous spiking neural P systems. Theor. Comput. Sci. 410, 2352–2364 (2009). [Google Scholar]
- Song T. & Pan L. Spiking neural P systems with rules on synapses working in maximum spikes consumption strategy. IEEE T. Nanobiosci. 14, 37–43 (2015). [DOI] [PubMed] [Google Scholar]
- Song T., Pan L. & Păun Gh. Asynchronous spiking neural P systems with local synchronization. Inform. Sciences 219, 197–207 (2012). [Google Scholar]
- Păun Gh. Spiking neural P systems with astrocyte-like control. J. Univers. Comput. Sci. 13, 1707–1721 (2007). [Google Scholar]
- Chen H., Freund R., Ionescu M., Păun Gh. & Pérez-Jiménez M. J. On string languages generated by spiking neural P systems. Fund. Inform. 75, 141–162 (2007). [Google Scholar]
- Zeng X., Xu L., Liu X. & Pan L. On languages generated by spiking neural P systems with weights. Inform. Sciences 278, 423–433 (2014). [Google Scholar]
- Păun A. & Păun Gh. Small universal spiking neural P systems. Biosystems 90, 48–60 (2007). [DOI] [PubMed] [Google Scholar]
- Song T., Pan L., Jiang K., Song B. & Chen W. Normal forms for some classes of sequential spiking neural P systems. IEEE T. Nanobiosci. 12, 255–264 (2013). [DOI] [PubMed] [Google Scholar]
- Pan L. & Păun Gh. Spiking neural P systems with anti-spikes. Int. J. Comput. Commun. 4, 273–282 (2009). [Google Scholar]
- Pan L., Wang J., Hoogeboom H. J. & Pérez-Jiménez M. J. Spiking neural P systems with weights. Neural Comput. 22, 2615–2646 (2010). [DOI] [PubMed] [Google Scholar]
- Pan L., Wang J. & Hoogeboom H. J. Spiking neural P systems with astrocytes. Neural Comput. 24, 805–825 (2012). [DOI] [PubMed] [Google Scholar]
- Song T., Wang X., Zhang Z. & Chen Z. Homogenous spiking neural P systems with anti-spikes. Neural Comput. Appl. 24, 1833–1841 (2013). [Google Scholar]
- Zeng X., Zhang X. & Pan L. Homogeneous spiking neural P systems. Fund. Inform. 97, 275–294 (2009). [Google Scholar]
- Zeng X., Zhang X., Song T. & Pan L. Spiking neural P systems with thresholds. Neural Comput. 26, 1340–1361 (2014). [DOI] [PubMed] [Google Scholar]
- Wang J., Shi P., Peng H., Pérez-Jiménez M. J. & Wang T. Weighted fuzzy spiking neural P systems. IEEE T. Fuzzy Syst. 21, 209–220 (2013). [Google Scholar]
- Peng H. et al. Fuzzy reasoning spiking neural P system for fault diagnosis. Inform. Sciences 235, 106–116 (2013). [Google Scholar]
- Ibarra O. H., Păun A. & Rodrguez-Patón A. Sequential SNP systems based on min/max spike number. Theor. Comput. Sci. 410, 2982–2991 (2009). [Google Scholar]
- Song T., Zou Q., Li X. & Zeng X. Asynchronous spiking neural P systems with rules on synapses. Neurocomputing 151, 1439–1445 (2015). [Google Scholar]
- Cabarle F. G. C., Adorna H. N., Pérez-Jiménez M. J. & Song T. Spiking neural P systems with structural plasticity. Neural Comput. Appl. 26, 1905–1917 (2015). [Google Scholar]
- Ionescu M. & Sburlan D. Several applications of spiking neural P systems. Proceedings of the Fifth Brainstorming Week on Membrane Computing, Sevilla, Spain (2007). [Google Scholar]
- Adl A., Badr A. & Farag I. Towards a spiking neural P systems OS. arXiv preprint arXiv:1012.0326 (2010).
- Liu X., Li Z., Liu J., Liu L. & Zeng X. Implementation of arithmetic operations with time-free spiking neural P systems. IEEE T. Nanobiosci. 14, 617–624 (2015). [DOI] [PubMed] [Google Scholar]
- Zeng X., Song T., Zhang X. & Pan L. Performing four basic arithmetic operations with spiking neural P systems. IEEE T. Nanobiosci. 11, 366–374 (2012). [DOI] [PubMed] [Google Scholar]
- Zhang G., Rong H., Neri F. & Pérez-Jiménez M. J. An optimization spiking neural P system for approximately solving combinatorial optimization problems. Int. J. Neural Syst. 24, 1440006 (2014). [DOI] [PubMed] [Google Scholar]
- Wang T. et al. Fault diagnosis of electric power systems based on fuzzy reasoning spiking neural P systems IEEE T. Power Syst. 30 1182–1194 (2015). [Google Scholar]
- Păun Gh., Rozenberg G. & Salomaa A. The Oxford handbook of membrane computing (Oxford University Press, Inc., 2010). [Google Scholar]
- Maass W. & Bishop C. M. Pulsed neural networks (MIT press, 2001). [Google Scholar]
- Siegelmann H. T. & Sontag E. D. On the computational power of neural nets. J. Comput. Syst. Sci. 50, 132–150 (1995). [Google Scholar]
- Buzsáki G. Neural syntax: cell assemblies, synapsembles, and readers. Neuron 68, 362–385 (2010). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Tetzlaff C., Kolodziejski C., Timme M., Tsodyks M. & Wörgötter F. Synaptic scaling enables dynamically distinct short-and long-term memory formation. BMC Neurosci. 14, P415 (2013). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Fritzke B. Growing cell structures a self-organizing network for unsupervised and supervised learning. Neural Networks 7, 1441–1460 (1994). [Google Scholar]
- Ultsch A. Self-organizing neural networks for visualisation and classification (Springer-Verlag, Berlin, 1993). [Google Scholar]
- Gheorghe M., Păun Gh., Pérez-Jiménez M. J. & Rozenberg G. Spiking neural P systems, research frontiers of membrane computing: Open problems and research topics. Int. J. Found. Comput. S. 24, 547–623 (2013). [Google Scholar]
- Minsky M. L. Computation: finite and infinite machines (Prentice-Hall, New Jersey, 1967). [Google Scholar]
- Rozenberg G. & Salomaa A. Handbook of formal languages, vol. 3 (Springer-Verlag, Berlin, 1997). [Google Scholar]
- Păun Gh. Membrane computing: an introduction (Springer-Verlag, Berlin, 2002). [Google Scholar]
- Korec I. Small universal register machines. Theor. Comput. Sci. 168, 267–301 (1996). [Google Scholar]
- Neary T. A universal spiking neural P system with 11 neurons. Proceedings of the Eleventh International Conference on Membrane Computing, Jena, Germany (2010).
- Pan L. & Zeng X. A note on small universal spiking neural P systems. In Lect. Notes Comput. Sci. vol. 5957, 436–447 (Springer-Verlag, Berlin, 2010). [Google Scholar]
- Păun A. & Sidoroff M. Sequentiality induced by spike number in SNP systems: small universal machines. Membrane Computing, 333–345 (Springer-Verlag, Berlin, 2012). [Google Scholar]
- Song T., Jiang Y., Shi X. & Zeng X. Small universal spiking neural P systems with anti-spikes. J. Comput. Theor. Nanos. 10, 999–1006 (2013). [Google Scholar]
- Zhang X., Zeng X. & Pan L. Smaller universal spiking neural P systems. In Annales Societatis Mathematicae Polonae. Series 4: Fundamenta Informaticae, vol. 87, 117–136 (2008). [Google Scholar]
- Burges C. J. A tutorial on support vector machines for pattern recognition. Data Min. Knowl. Disc. 2, 121–167 (1998). [Google Scholar]
- Liu C.-L., Nakashima K., Sako H. & Fujisawa H. Handwritten digit recognition: benchmarking of state-of-the-art techniques. Pattern Recogn. 36, 2271–2285 (2003). [Google Scholar]
- Bioinformatics-Wikipedia, the free encyclopedia., 5 May 2016.
- Zou Q., Li J., Song L., Zeng X. & Wang G. Similarity computation strategies in the microRNA disease network: a survey. Brief Funct. Genomic 15, 55–64 (2015). [DOI] [PubMed] [Google Scholar]
- Lin C. et al. LibD3C: Ensemble classifiers with a clustering and dynamic selection strategy. Neurocomputing 123, 424–435 (2014). [Google Scholar]
- Liu B. et al. Pse-in-One: a web server for generating various modes of pseudo components of DNA, RNA, and protein sequences. Nucleic Acids Res. W1, W65–W71 (2015). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Zou Q., Hu Q., Guo M. & Wang G. Halign: Fast multiple similar DNA/RNA sequence alignment based on the centre star strategy. Bioinformatics 31, 2475–2481 (2015). [DOI] [PubMed] [Google Scholar]
- Zeng J., Li D., Wu Y., Zou Q. & Liu X. An empirical study of features fusion techniques for protein-protein interaction prediction. Curr. Bioinform. 11, 4–12 (2016). [Google Scholar]
- Yunfeng W. & S. K. Combining least-squares support vector machines for classification of biomedical signals: a case study with knee-joint vibroarthrographic signals. J Exp. Theor. Artif. In. 23, 63–77 (2011). [Google Scholar]
- Song L. et al. ndna-prot: identification of DNA-binding proteins based on unbalanced classification. BMC Bioinformatics 15, 1 (2014). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Liu B., Liu F., Fang L., Wang X. & Chou K. repDNA: a python package to generate various modes of feature vectors for DNA sequences by incorporating user-defined physicochemical properties and sequence-order effects. Bioinformatics 31, 1307–1309 (2015). [DOI] [PubMed] [Google Scholar]
- Zeng X., Liao Y., Liu Y. & Zou Q. Prediction and validation of disease genes using hetesim scores. IEEE ACM T Comput. Bi., 10.1109/TCBB.2016.2520947 (2016). [DOI] [PubMed] [Google Scholar]
- Zou Q., Li J., Song L., Zeng X. & Wang G. Similarity computation strategies in the microrna-disease network: a survey. BRIEF Funct. Genomic 15, 55–64 (2016). [DOI] [PubMed] [Google Scholar]
- Zeng X., Zhang X. & Zou Q. Integrative approaches for predicting microrna function and prioritizing disease-related microRNA using biological interaction networks. Brief Bioinform. 17, 193–203 (2015). [DOI] [PubMed] [Google Scholar]