
Fig. 1.
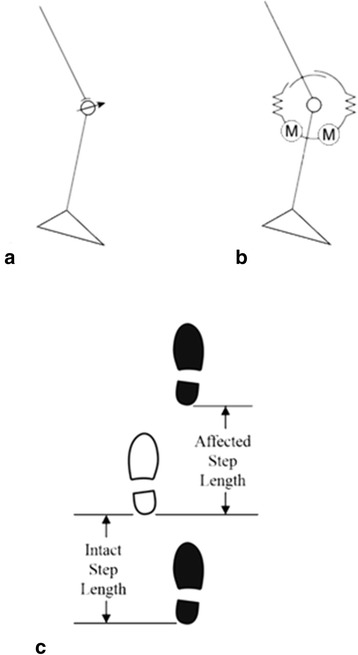
Schematic representation of the mechanics of the C-Leg (a) with its variable damper and VI-Knee (b) with its series elastic actuators in an agonist-antagonist arrangement for flexion and extension. An illustration of how step length is defined for this work with the shaded footprint representing the prosthetic foot and the open print the intact foot (c)