
Figure 1. Social cooperation maze.
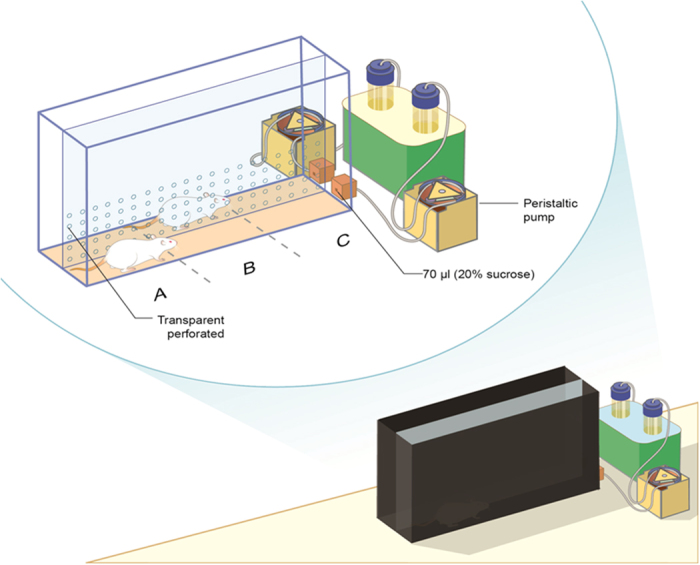
Schematic illustration of the experimental objective. A black lusterless perspex box (40 cm W, 120 cm L, 50 cm H) divided vertically into two lanes by a transparent-perforated divider. The movement of the rats is monitored by a camera, providing the software with real-time input regarding the relative location of the rats in the 3 predefined zones (“A” to “B” to “C”). Upon the fulfillment of the computerized algorithm of cooperative condition, the peristaltic pumps provide mutual reward (70 μl, 20% sucrose drop) through the liquid dispensers. Re-gaining of mutual reward requires additional coordinated movement from zone “A” to “C”.