
Figure 17.
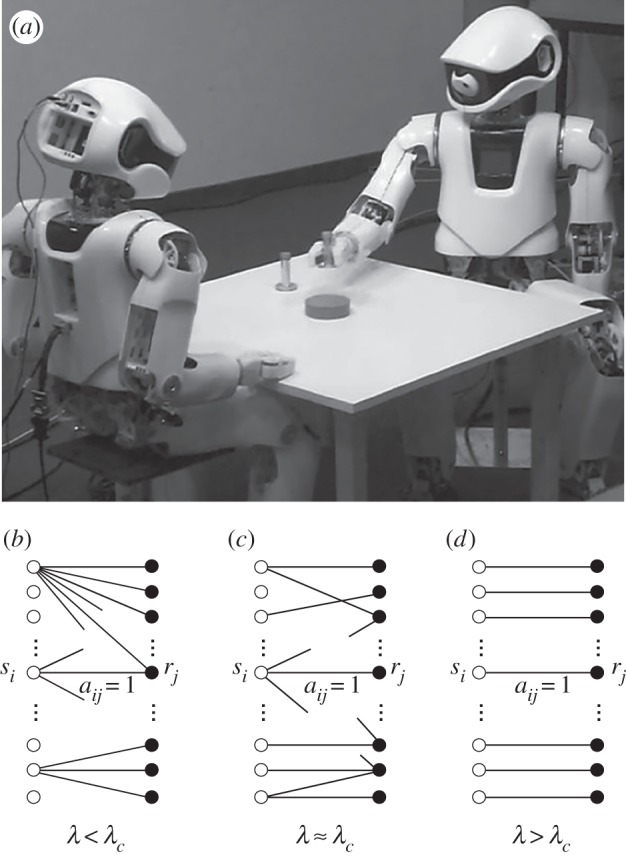
Emergent synthetic languages. Using embodied robotic agents (a) a proto-grammar can emerge (image from the Neurocybernetics group at Osnabruck) that can be traced through the analysis of the underlying synthetic language network developed by the agents. A formal model of language (c) is described as an evolvable bipartite signal-object graph (b–d) whose topology depends on the specific trade-offs associated with the efforts of communicating agents, as described by equation (9.5) as weighted by a control parameter λ.