
Figure 1. Assembly and disassembly for modular microrobotics.
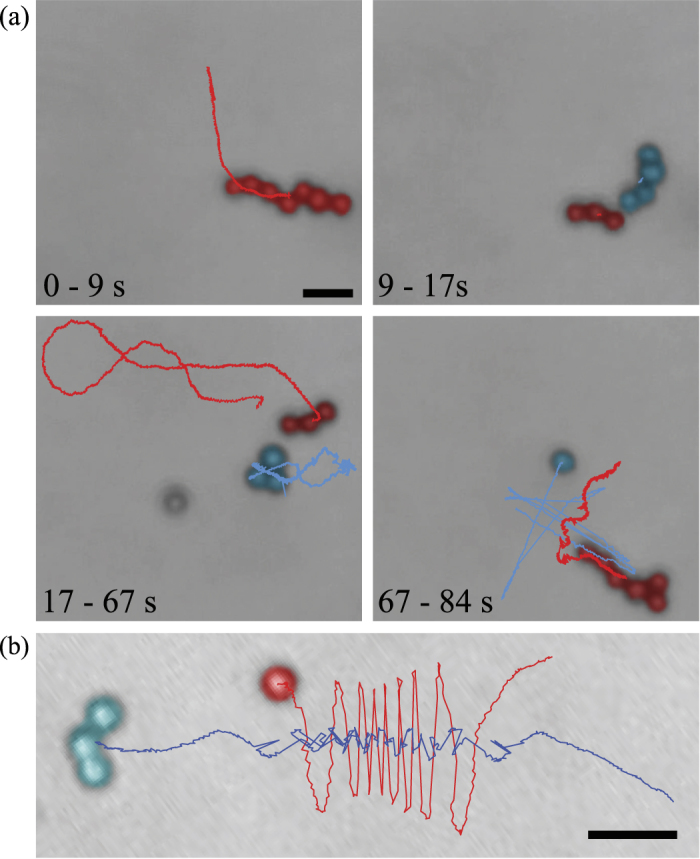
(a) Experimental demonstration of assembly and disassembly by manipulation of the control inputs (field strength and rotation frequency). (b) During a failure to assemble, the particles orbit around the microswimmer due to hydrodynamic force.