
Figure 5. Representative experiment of a modular microrobot.
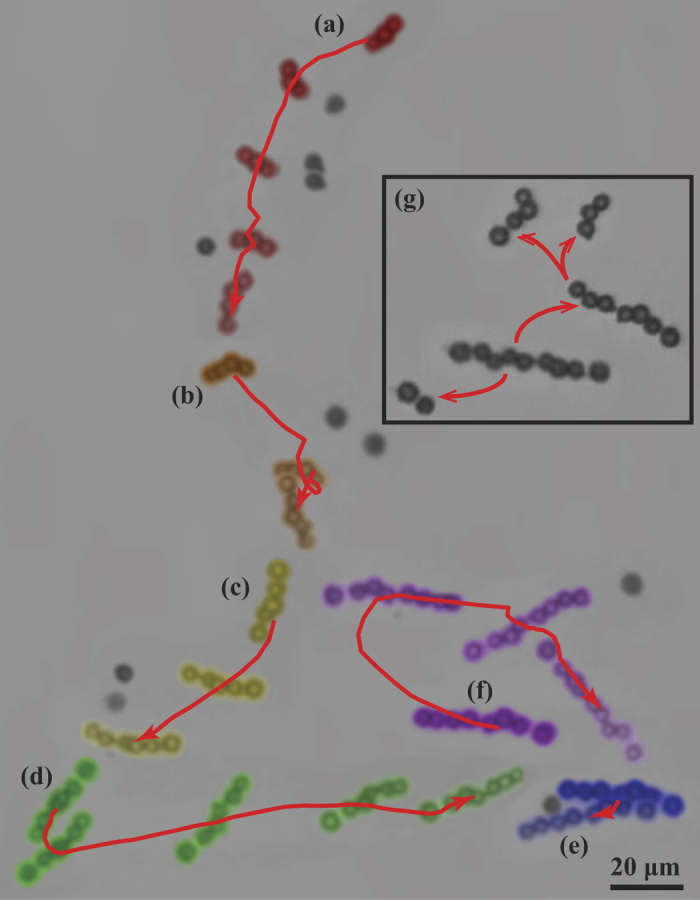
From (a), a 3-bead robotic microswimmer approaches and assemble with a single non-motile bead and transform into a 4-bead microswimmer. From (b–f), the microswimmer continues to approach and combine with single beads, and eventually modulate into a 9-bead microswimmer. At (g), the 9-bead microswimmer breaks into three different microswimmers under high rotation frequency due to increased shear stress leading to structural flexing.