
Figure 15.
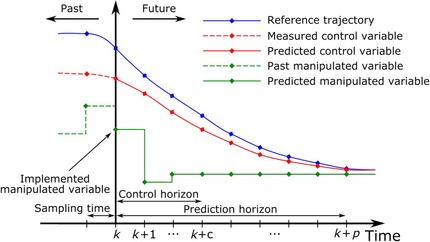
Schematic structure of a MPC approach (adapted from Ref. 265). Past measurements of control variables and prior implemented actuator values are used to predict the future behavior of the system.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
Schematic structure of a MPC approach (adapted from Ref. 265). Past measurements of control variables and prior implemented actuator values are used to predict the future behavior of the system.