
Figure 1. Conceptual model of posture and locomotion coupling during the initiation of stepping .
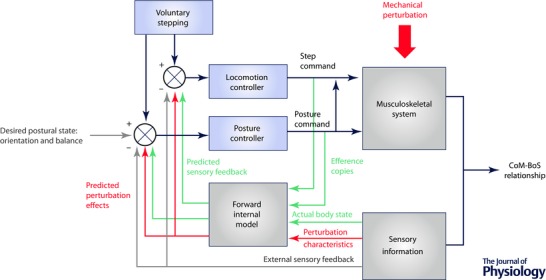
To initiate voluntary stepping, posture and locomotion networks are activated in parallel to generate motor commands (black arrows) where the posture network acts on the stepping controller. These motor outputs modify the body centre of mass (CoM)–base of support (BoS) relationship. Efferent copies of the motor commands and sensory information about the actual state of the body can be used by the CNS (internal feedback loops – green arrows) to estimate the future state of instability produced by the evolving movement, and modify in advance the two commands based on an internal representation of the body and external environment (forward model). On‐line sensory information can also modulate posture and locomotion commands via external feedback information (grey arrows). For perturbation‐induced stepping, an external mechanical perturbation (red arrows) modifies the CoM–BoS relationship. Multi‐sensory systems transmit information about the evolving state of instability that can be used by the CNS to estimate its consequences using the internal representation of the body, and to activate posture and locomotion networks to initiate a suitably directed, timed and scaled induced step to compensate for the perturbation. Again, these commands can be modified via internal or external feedback processes.