
Fig. 6.
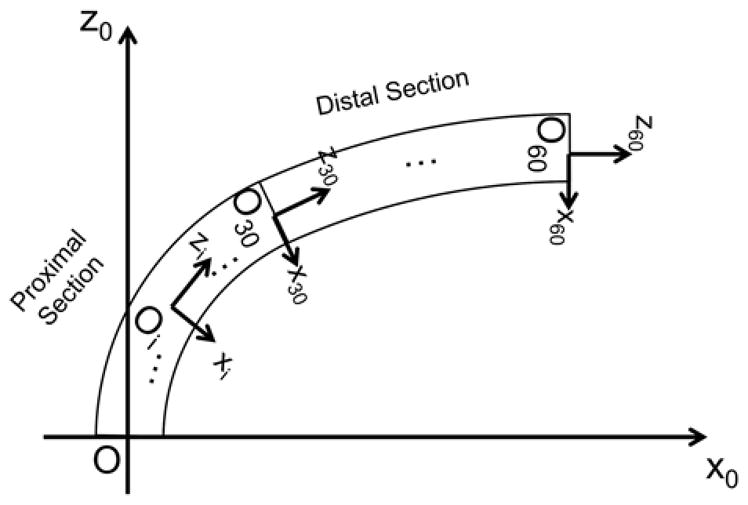
Frame convention of robot. The proximal end of the tendon-driven continuum robot is mechanically grounded on the task space coordinate. The +z-axis is defined as tangent to the base of the robot. Each of the proximal and distal sections of the robot has thirty joint coordinates