
Fig. 9.
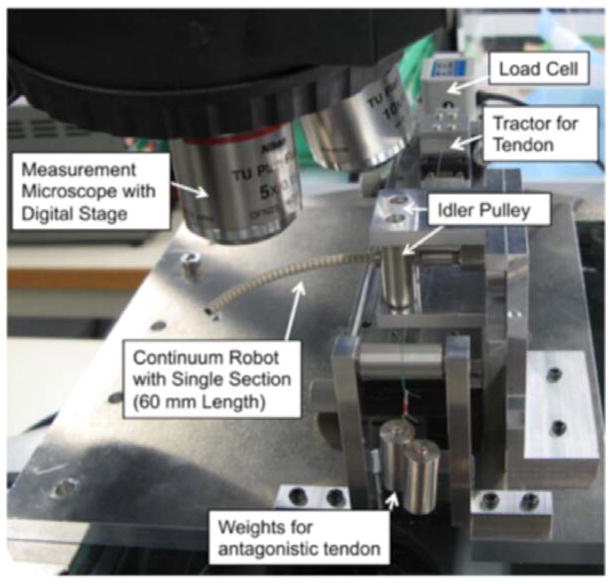
Experimental apparatus for articulation experiment. The single section of the tendon-driven continuum robot was positioned with its bending plane aligned horizontally, and it supported its articulation posture by itself. The tendon was fixed to the tractor through the idler pulley. The tractor was mounted on the slide stage and pulled with the load cell (LTS-2KA, Kyowa Electronic Instruments) that connected to the signal conditioner (CDV-700A, Kyowa Electronic Instruments) to measure the tension in the tendon during actuation. The posture of the robot was observed with the measurement microscope (STM-UM, Olympus). The digitized position stage in the microscope recorded the position of the hinges as the posture. For the antagonistic tendons layout, we used a weight to apply gravitational forces on the tendon on the other side from the load cell (−x direction from the centroid of the robot in Fig. 2). The weight was hung on the end of tendons via idler pulleys so as to pull the tendon horizontally.