
Figure 2.
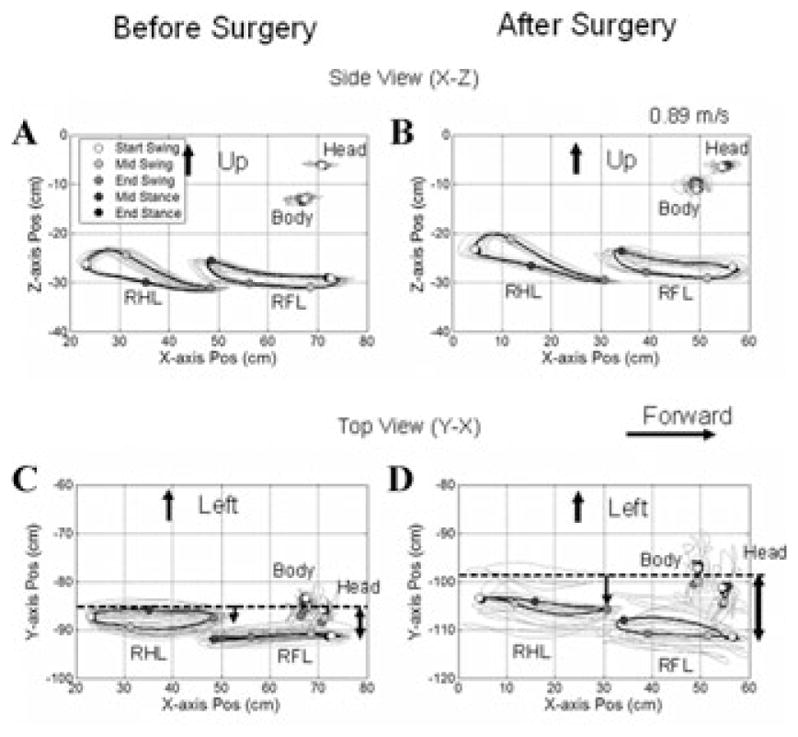
Side (X–Z, A, B) and top (Y–X, C, D) views of Cy115’s walking at 0.89 m/sec before (A, C) and 20 days (B, D) after all six semicircular canals were plugged. The ordinates in A and B show the Z position of the limb as a function of position along the X-axis. Open circles mark the beginning of the right hindlimb (RHL), and they become progressively darker as the RHL progresses from swing through stance phases. The head and body positions are also shown. The animal had its head turned slightly to the right as shown both in C and D. The limb movements were not changed in the X–Z projections before and after surgery (A, B), but there was considerable increase in the variation of the limb movements in the Y–Z plane (D) after canal plugging. The animal also had a broad-based gait, more in the forelimbs, as shown by the distance of the RFL from the body (C, D, arrows).