
Fig. 12.
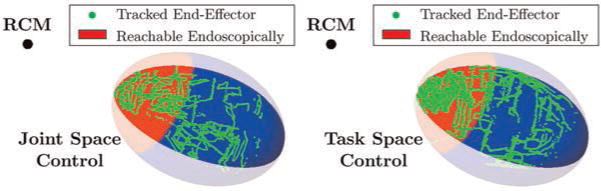
Magnetic tracking data showing the positions on the desired resection surface accessed by two surgeons using the system in joint space mode (left) and task space mode (right). The lighter colored region indicates the best-case scenario for the surface reachable by a conventional straight endoscope, without tissue deformation (i.e. the reachable area without using the robot and using only a straight, rigid endoscope).