
Fig. 16.
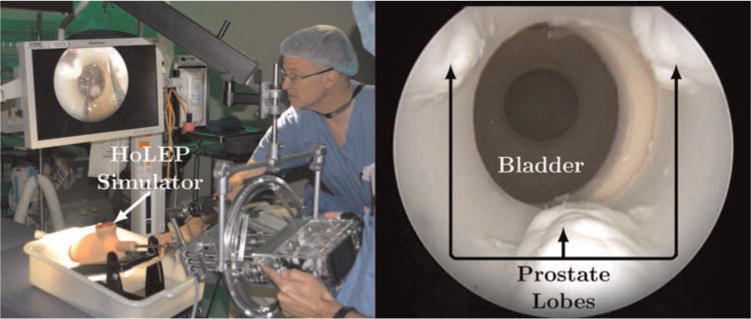
(Left) The counterbalanced robot operates transurethrally through the HoLEP simulator. The surgeons visually servo the concentric tube manipulator tips in the task space with high-definition endoscopic video feedback. In this experiment, surgeons preferred a large off-board monitor to the onboard screen between their hands, though it is possible to show the endoscope image on either or both displays. (Right) The endoscopic view shows the three lobes of the synthetic prostate. Each surgeon was tasked with laser resecting one lobe of the prostate phantom.