
Fig. 9.
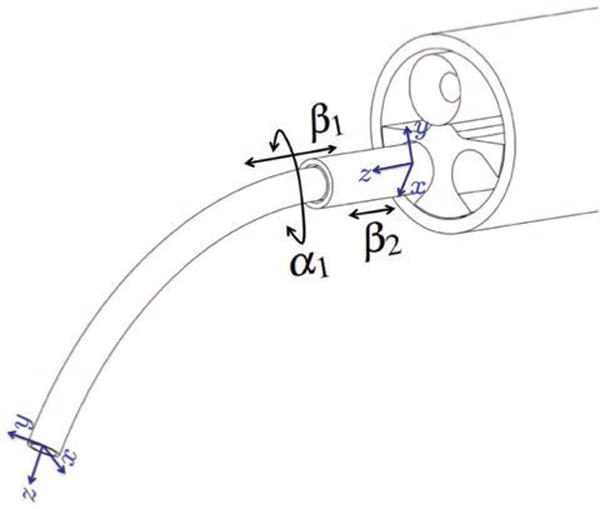
The concentric tube manipulators used in our experiments are a special case where the outer tube is straight and stiff and the inner tube is curved and elastic. We define the fixed base frame of the manipulator at the tip of the endoscope, and a body-attached frame at the tip of the inner tube. Rotation of the inner tube, translation of the inner tube, and translation of the outer tube are given by the variables α1, β1, and β2, respectively.