
Figure 2.
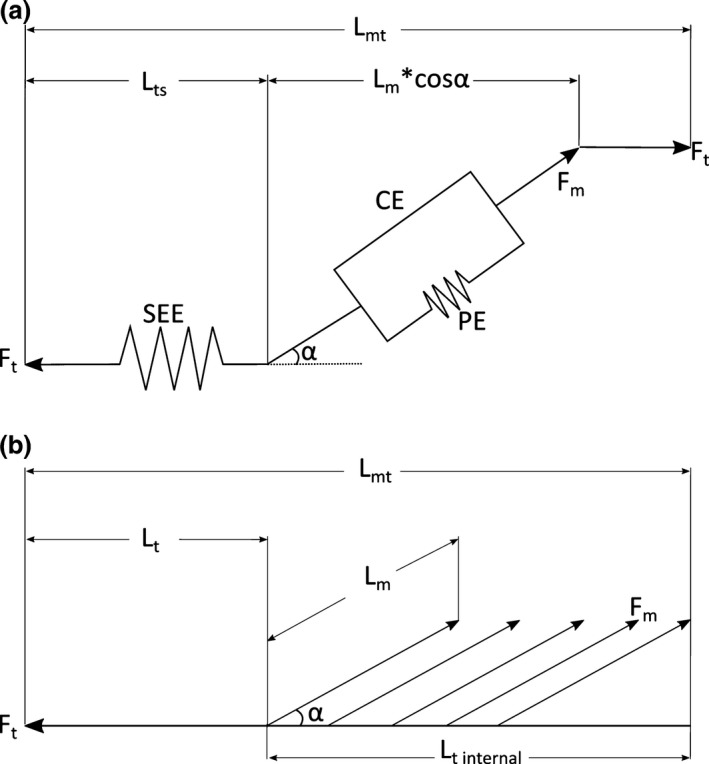
(a) A generic Hill‐type muscle model used to estimate muscle contractile dynamics in the musculoskeletal model. It consists of a contractile element (CE) connected in parallel to a passive elastic element (PE), which together represent the muscle fibres and their mechanical properties. Muscle force (F m) depends primarily on fibre length and activation level. The contractile element is in series with a series elastic element (SEE), which represents the elastic properties of the entire tendon. Tendon force (F t) is equal to F m*cosα, where α represents fibre pennation angle. The entire musculotendon unit length (L mt) is equal to L t + L m*cosα, where L m represents muscle length. Adapted from Delp et al. (1990) and O'Neill et al. (2013). (b) A realistic representation of a typical unipennate muscle, with an external tendon (L t) and a large internal tendon (L t internal), to which many muscle fibres attach. These variables together represent L ts in the model. See Table 9 for a comparison between L t and L ts.