
Figure 5.
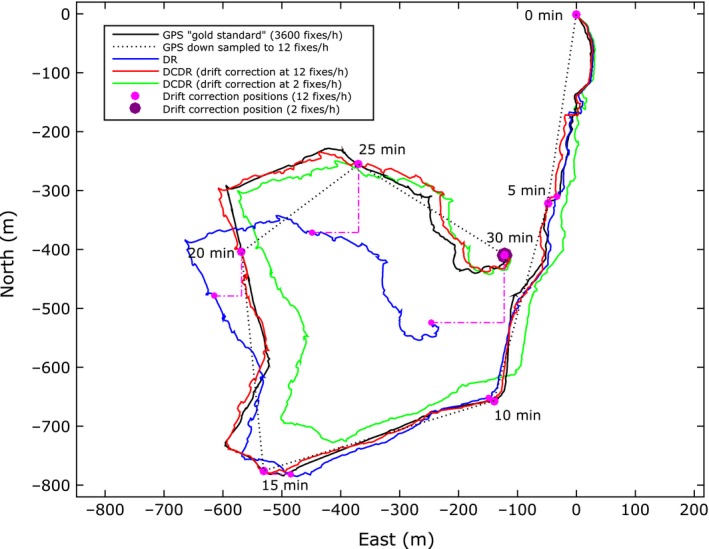
An example of gold standard and down‐sampled GPS paths, dead reckoned (DR), and two drift‐corrected dead reckoned (DCDR) paths from a domestic dog. This example is taken from domestic dog 5, trial 2. The gold standard GPS path has a sampling frequency of 3600 fixes per hour (1 Hz) and a true distance travelled (dt) of 2.43 km. The down‐sampled GPS path shows the problem of using low sample rate GPS data for distance estimation. It was created by down‐sampling the gold standard GPS path to 12 fixes per hour. The apparent distance travelled (da) calculated from this path is 1.99 km. The DR path drifts away from the gold standard GPS path as errors accumulate with time. This drift is reduced by applying a linear correction to the DR path between GPS position fixes (DCDR paths). The drift correction points are marked using magenta circles. Using points taken at 2 and 12 fixes per hour makes little difference to the apparent distances travelled (2.43 and 2.57 km, respectively), and hence, the proportional accuracy values are similar (0.99 and 1.05, respectively). Using drift correction with the higher GPS position fix rate, however, improves the ability of the dead reckoned path to follow the gold standard GPS path. For this example, DCDR with drift correction at 2 fixes per hour has a 2D‐RMS position error of 54.3 m; with 12 fixes per hour position error is reduced to only 12.9 m.