
Figure 3.
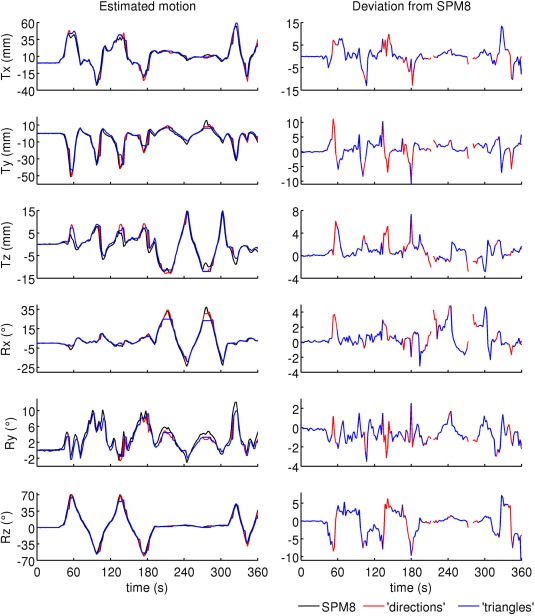
Motion estimates from image registration of EPI (SPM8), wireless markers using additional sampling directions (“directions”) and the method by Sengupta et al (“triangles”). Deviations from SPM8 are shown for points where motion tracking did not fail. Marker positions were determined with the “directions” algorithm. Minimum/maximum motion estimates derived from the probes were (relative to the starting position): −33.4/61.0 mm, −51.5/10.9 mm, −13.0/14.6 mm, −19.2/34.4°, −2.7/10.0°, −60.9/70.9°. [Color figure can be viewed in the online issue, which is available at wileyonlinelibrary.com.]