
Fig. 3.
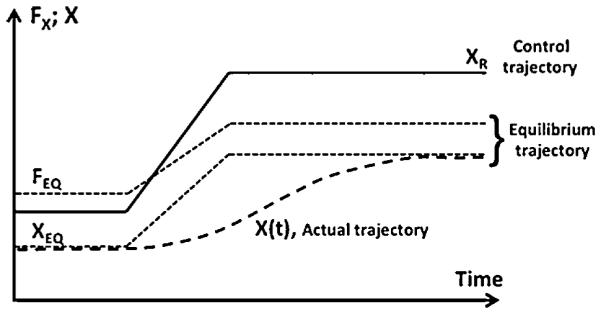
Control of an action can be adequately described as a time shift on the referent coordinate (XR) of the effector. It leads to changes in equilibrium states (combinations of force and coordinate, FEQ and XEQ) that depend on the current external forces (equilibrium trajectory). Actual trajectory lags behind and reflects mechanical properties of the effector.