

Abstract
We exhibit a fundamental relationship between measures of dynamical and structural stability of linear dynamical systems—e.g. linearized models in the vicinity of equilibria. We show that dynamical stability, quantified via the response to external perturbations (i.e. perturbation of dynamical variables), coincides with the minimal internal perturbation (i.e. perturbations of interactions between variables) able to render the system unstable. First, by reformulating a result of control theory, we explain that harmonic external perturbations reflect the spectral sensitivity of the Jacobian matrix at the equilibrium, with respect to constant changes of its coefficients. However, for this equivalence to hold, imaginary changes of the Jacobian’s coefficients have to be allowed. The connection with dynamical stability is thus lost for real dynamical systems. We show that this issue can be avoided, thus recovering the fundamental link between dynamical and structural stability, by considering stochastic noise as external and internal perturbations. More precisely, we demonstrate that a linear system’s response to white-noise perturbations directly reflects the intensity of internal white-noise disturbance that it can accommodate before becoming stochastically unstable.
Keywords: linear systems, non-normal matrices, external perturbations, internal perturbations, stability radius, white-noise perturbations
1. Prologue
Understanding the stability of dynamical systems is fundamental in numerous applications, from classical mechanics, fluid dynamics, engineering, to biology [1–6]. Stability refers to the ability of a subset of phase space to attract trajectories from its vicinity. In other words, a given state is dynamically stable if trajectories remain close to that state despite small perturbations. Such sets are called attractors, the most basic kind being equilibria. Regardless of their conceptual simplicity, they commonly appear in a large variety of models. For instance, their study in ecology is fundamental to understand the mechanisms that stabilize ecosystems and support their staggering diversity [6]. In fluid mechanics, the laminar state can be seen as an equilibrium, and the transition to turbulence as caused by a loss of stability [1]. In the context of dynamics of nodes of electric power grids, the equilibrium is a desired state where the generator operates in synchrony with the grid [4].
In deterministic dynamical systems, vanishing points of the generating vector field are (if they exist) the system’s equilibria. Dynamical stability of a given equilibrium is assessed in terms of the spectrum of the associated Jacobian matrix. The stability criterion is that all its eigenvalues have negative real parts. Since Lyapunov [7], this approach has been fruitfully applied across disciplines [6,8,9].
On the other hand, structural stability relates to the robustness of the qualitative dynamical picture with respect to small changes in the system structure [10,11]. This notion is particularly important when the system is a simplified model of a more complicated real-world system, which is virtually always the case in applications. For the model to inform on the real-world system, it must be robust with respect to small perturbations, uncertainties and so forth [12,13]. There are broad classes of models that are known to be structurally stable, the most basic ones being hyperbolic linear systems, a result that justifies the study of linearized models in the vicinity of equilibria.
The above-described two stability notions are qualitative, yet it is often important to quantify stability, either dynamical or structural, in order to compare different models or to assess the effect of parameters on stability. Qualitative notions answer the question is a particular state (or model) stable? Whereas quantitative measures answer how stable is this state (or model)? Dynamical stability is typically quantified via the system response to pulse-perturbations, that is, instantaneous displacements in phase space, but other perturbations are also important. For instance, periodic forcing can reveal resonances. Although far less common in the literature [14–16], measures of structural stability are by no means less relevant. They quantify the stability of the model itself, that is, the intensity of structural perturbations that it can accommodate before its behaviour qualitatively changes.
In this article, we focus on real, stable, linear dynamical systems, typically derived from a linearization of an underlying nonlinear model in the vicinity of a stable equilibrium. We do not address the issue of finding the equilibrium, but rather assume that an equilibrium exists and is fixed, and that the local dynamics in its vicinity are known. As long as we remain in a neighbourhood of the equilibrium, our analysis does not depend on the details of the underlying nonlinear model.
In this linear (or local) setting, we introduce natural measures of dynamical stability, quantifying a system’s response to persistent forcing. We compare them with natural measures of structural stability, quantifying the smallest change in the dynamical structure (i.e. of the interactions between variables) leading to destabilization. We show that these measures coincide, so that, in the vicinity of an equilibrium, the dynamical response to external perturbations reflects the system’s sensitivity to changes of its local structure.
In §2, we revisit a result of control theory, showing that responses to harmonic external perturbations reflect the spectral sensitivity of the Jacobian matrix at the equilibrium, with respect to constant changes of its coefficients. In an elementary example, we illustrate a caveat of this approach, showing that this relationship does not always hold for real systems.
In §3, in which our main result is stated, we demonstrate that the fundamental link between dynamical and structural stability of linear systems can be recovered by considering stochastic noise as external and internal perturbations.
2. Dynamical and structural stability: harmonic perturbations
The standard procedure to assess stability of an equilibrium consists of linearizing the vector field in its vicinity, effectively reducing the local dynamics to a linear system of the form , where A is the Jacobian matrix evaluated at the equilibrium, and the vector x denotes multidimensional displacements from that equilibrium. Defining the spectral abscissa of A as
| 2.1 |
we say that a matrix with negative spectral abscissa is stable (i.e. the associated equilibrium x=0 is stable) and unstable otherwise.
A straightforward way to quantify the dynamical stability of a stable equilibrium is to analyse the system’s local response to harmonic forcing. This amounts to solving
where is the frequency of a real rotating perturbation. The stationary response is ℜ(eiωtw) with w=(iω−A)−1u. The norm of the complex vector w is the mean amplitude of the induced oscillations. The spectral norm of the matrix (iω−A)−1 gives the strongest system response to harmonic forcing of frequency ω. To define a measure of stability, we take the inverse of the largest system amplification of harmonic forcing. This translates as
| 2.2 |
The number ω realizing the maximum is called the resonant frequency. It can be shown [17] that relates to the maximal power gain over wide-sense stationary signals, indicating that, although defined with respect to a specific class of forcing, it is a general indicator of the ability of an equilibrium to absorb external perturbations.
Let us now turn to the problem of quantifying structural stability. For equilibria, we may consider how close the Jacobian matrix A is from being unstable, that is, the minimal constant change in its coefficients that can push its dominant eigenvalue into the instability region of the complex plane. Measuring the distance to instability as the spectral norm of the smallest matrix P rendering A+P unstable, this yields
| 2.3 |
This definition of structural stability is also known as the stability radius [18]. The inequality in (2.3) comes from the fact that the perturbation is always sufficient to destabilize A. In fact, it is the most efficient way to destabilize A when A is normal (i.e. has orthonormal eigenvectors) in that case the inequality is an equality [8]. The absolute value of the spectral abscissa |α(A)| is the Euclidian distance to instability measured in the complex plane. Hence, the two distances, stability radius and spectral abscissa, coincide when the Jacobian matrix is normal.
There is a strong link between and the dynamical measure introduced in (2.2). To reveal this link suppose that for some stable matrix A, where v>0 is the strongest response associated with the resonance ω. Pick two normalized vectors: u, spanning the direction of perturbation and w, spanning the direction of response, both associated with the resonance ω. We have that
We can construct a destabilizing matrix from the vectors u and w. This is done by choosing P=v−1uw*, so that ∥P∥=v−1, Pw=v−1u and
Hence, P destabilizes A, meaning that .
Conversely, suppose that . There exists a matrix P with ∥P∥=p such that A+P is unstable: for some ω and normalized vector w,
with u=Pw. Because ∥u∥≤p, we deduce that ∥(iω−A)−1∥≥p−1. Hence,
| 2.4 |
giving from (2.2) a computable expression for structural stability. Equation (2.4) corresponds to a well-known result in control theory [18], which we interpret here in terms of dynamical and structural stability of equilibria.
There is however a caveat. The quantitative measure of structural stability we have considered allows for complex matrix perturbations, that almost never make sense in applications. In fact, computing the corresponding real structural stability, which we denote as , involves a complicated global optimization problem [19]. In general, dynamical stability can be much smaller than its real structural counterpart. This issue is particularly apparent in the following elementary example. Consider the sequence of Jacobian matrices
| 2.5 |
whose eigenvalues are −1±iM, so that α(A)=−1. The associated equilibria are stable for all values of M. The strongest response to harmonic forcing grows with M. In addition, complex perturbations have an effect of order M on the real part of the spectrum, so that perturbations of order M−1 can destabilize the matrix.
This is not true for real perturbations as
Real structural stability can thus be completely disconnected from its dynamical counterpart.
3. Dynamical and structural stability: white-noise perturbations
Let us now transpose the relationship between dynamical and structural stability to white-noise forcing, often used to model the effect of erratic external perturbations [17,20]. The local effect of white noise is best expressed using the formalism of stochastic differential equations (SDEs). It reads as
| 3.1 |
where Wt is a vector of independent Wiener processes, representing various external factors acting on the system, with the matrix T describing how these factors affect system variables. The first moments evolve as and converge to zero if A is stable. The second moments, represented as covariance matrices , follow the deterministic equation [21,22]
| 3.2 |
with , called hereafter the lifted operator, and Σ=TT⊤, a positive semi-definite matrix, encoding the effective correlations of the noise. If A is stable, any initial covariance matrix converges to
the unique attractor of (3.2).
In analogy with the measure constructed via the largest local response to normalized harmonic perturbations, we define a measure of dynamical stability by taking the inverse of the strongest system response over normalized white-noise perturbations. This leads us to
| 3.3 |
where the supremum is taken over covariance matrices of the real external noise. The use of the Frobenius norm, ∥Σ∥F=Tr(Σ⊤Σ)1/2, to normalize the correlation matrices allows us to see them as vectors endowed with the usual scalar product and Euclidean norm. Because is a completely positive map, the matrix Σ realizing the norm is a positive semi-definite matrix [23]. We thus get that
| 3.4 |
Note that the lifted operator can be expressed as a larger matrix , giving a simple way to compute .
So far, as in control theory, we considered constant changes in the Jacobian matrix to quantify structural stability. We now embark on a different path, assuming that the coefficients of the Jacobian matrix fluctuate. In time-series analysis, such variations are called process errors, whereas those previously considered would correspond to observation errors [24]. To model the effect of internal perturbations, we pick a set of real matrices Pk and independent Wiener processes , and consider the following homogeneous linear SDE
| 3.5 |
where the matrices Pk describe fluctuations of the matrix entries Aij and their correlations. For example, independent fluctuations of variance σ2 of all entries Aij would correspond to , where {ei} stands for the standard orthonormal basis of phase space. Note that the representation of multiplicative noise in (3.5) corresponds to Itô’s interpretation of stochasticity [22]. We discuss this point further below. In Itô’s interpretation, the first moments μ are unperturbed, and follow , converging to equilibrium if A is stable. The effect of allowing the interactions to fluctuate appears in the second moments—the (co)variances. To see this, we again lift the SDE (3.5) to act on covariance matrices, giving [21,22]
| 3.6 |
with . Let us measure the intensity of the internal perturbation by the spectral norm . In the case of independent fluctuations of all entries of A, , with n the system dimension. We can then define stochastic structural stability as the minimal internal perturbation intensity able to destabilize the second moments of (3.5),
| 3.7 |
where the infimum is over perturbations constructed from an arbitrary sequence of real matrices Pk.
Theorem 3.1 —
For real linear systems, measures of structural and dynamical stability coincide, in the sense that
3.8 Dynamical stability is quantified as the inverse of the maximal variance amplification of external white-noise perturbation. Structural stability is quantified as the minimal internal white-noise perturbation needed to destabilize the system’s variance. It relates to (resp. ) the minimal complex (resp. real) constant perturbation able to destabilize the equilibrium’s Jacobian matrix, via the following chain of inequalities
3.9 with α the spectral abscissa of the Jacobian matrix at the equilibrium. (3.9) collapses onto an equality when the Jacobian is normal (i.e. has orthogonal eigenvectors).
The example of Jacobian matrices (2.5) is revisited in figure 1. We see that the low stability with respect to constant imaginary perturbations detected by is also present when considering real stochastic fluctuations in the matrix coefficients, as predicted by . Inequality (3.9) is illustrated in figure 2 showing that, although associated with real perturbations, can sometimes be much smaller than its deterministic and complex counterpart .
Figure 1.

Stochastic destabilization by internal white-noise perturbation. The Jacobian matrix is . We have that , so that according to (3.8) fluctuations with intensity affecting the matrix A can destabilize the equilibrium. We show a realization of the process dXt=(A dt+σP dWt)Xt with and ∥P∥=1. In the rightmost panel, the variance σ2=0.04 is large enough to show premises of destabilization. Recall that for this matrix the real stability radius was independent of M, with .
Figure 2.
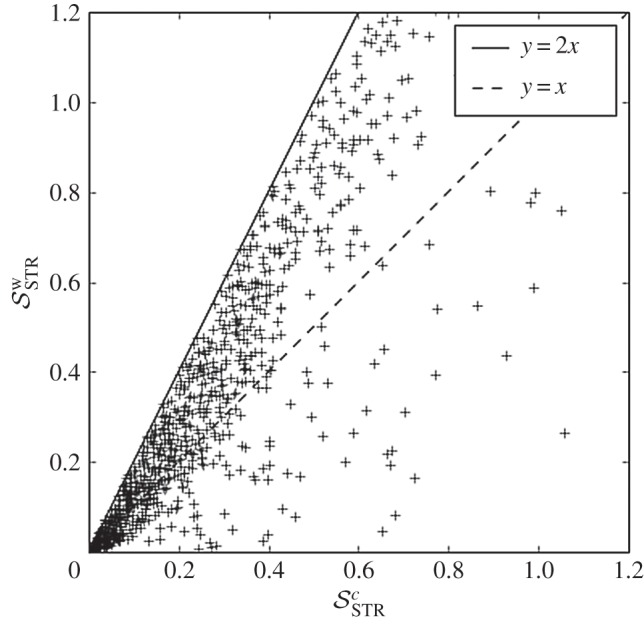
Illustration of the structural stability ordering (3.9). We randomly generated 1000 stable 3×3 matrices. Entries were independently drawn from a normal distribution of zero mean and unit variance, discarding unstable matrices. We see that the stochastic structural stability of a matrix, , can be much smaller than the smallest constant complex change needed to destabilize that matrix, . The equality is attained for normal matrices.
We measured structural stability as a distance to instability from the perspective of the second moments of the linear SDE (3.5), yet any perturbation acting as a multiplicative noise can destabilize moments of high enough order.1 However, as long as the second moments are bounded, Chebyshev’s inequality, that plays a pivotal role in the theory of persistence [25], provides a control on the probability of excursions away from equilibrium. Indeed, we have that and Chebyshev’s inequality reads, for any δ>0, and time t≥0,
| 3.10 |
which, by virtue of (3.6) and equivalence of trace and Frobenius norms, goes to zero as time flows forward as long as is stable. In other words, loosing stability in the sense of (3.7) implies loosing control on the probability of excursions from equilibrium. The importance of this kind of probabilistic stability, called mean-square asymptotic stability, is discussed in [20], with examples from ecology, turbulent fluid mechanics, and system control.
We mentioned that the dynamics defined by the SDE (3.5) correspond to Itô’s interpretation of Wiener processes [22]. Such stochastic signals can be seen as trains of delta peaks, occurring at random instants [22]. In Itô’s prescription, the intensity of random pulses should be determined by the state variables before the pulse. For instance, the pulse x(t)δ(t−tk) arriving at time tk should be multiplied by . On the other hand, Statonovich’s prescription would be to multiply that pulse by . The two prescriptions yield the same SDE when the noise is additive (i.e. only adds noise to dynamical variables), hence in our case, the same definition of dynamical stability . A difference occurs, the spurious drift, when the noise affects the intercations between dynamical variables, i.e. when it affects the Jacobian matrix as in (3.5). This yields a different definition of stochastic structural stability than . Choosing between the two prescriptions depends on the physical origin of the noise [22,26]. If the system is intrinsically stochastic, then Itô’s interpretation should be used. If the noise is created by the application of a random force on an otherwise deterministic system, then Stratonovich’s interpretation makes more sense.
4. Proving the theorem
To prove our main result, we follow a reasoning similar to the one that led to the identity (2.4). Beyond establishing the validity of our claim, the proof shows how to explicitly construct destabilizing internal perturbation from external perturbations. A construction that could be useful for applications.
Let us start by showing that . For a stable Jacobian matrix A, suppose that . By (3.3), this means that there exists two positive normalized matrices, the noise correlation matrix Σ and the associated system response correlation matrix Π, such that
As in the deterministic setting, using Σ and Π, we construct a destabilizing operator . However, for this operator to represent real internal noise, it must be of the form for a set of real matrices Pk. To construct such an operator, we use the spectral decomposition of the positive semi-definite matrices Σ and Π
and put , representing n2 independent internal perturbations of the matrix A. We have
and, using the Hilbert–Schmidt inner product 〈X,Y 〉=Tr(X*Y) from which the Frobenius norm derives, we see that takes the compact form
showing that and . We thus have that
Hence, destabilizes the lifted dynamics and corresponds to real internal noise of intensity . Thus,
Conversely, suppose that . There exists an operator with such that is unstable, i.e. it has a dominant eigenvalue on the imaginary axis. There can be strictly imaginary dominant eigenvalues, but we show in appendix A that there is also a dominant eigenvalue at zero. Hence, for some matrix X with ∥X∥F=1
with . Because ∥Y ∥F≤p, we find that , so that by virtue of (3.4)
which concludes the proof of (3.8). We refer to appendix B for the proof of (3.9).
5. Epilogue
For linear systems, we demonstrated that dynamical and structural stability are remarkably connected concepts, in the sense that the dynamical response to erratic and persistent external perturbations (i.e. direct perturbations of dynamical variables) exactly reflects a system’s sensitivity to stochastic fluctuations of its internal structure (i.e. of the interactions between its constituent variables). This means that, in the vicinity of an equilibrium, the dynamical response to external perturbations informs on the system’s sensitivity to changes of its local structure.
We quantified dynamical stability via the maximal system response to external perturbations, and structural stability via the minimal destabilizing internal perturbation. However, it is not necessary to consider these worst-case scenarios for a connection between these two stability notions to hold. Indeed, to any external perturbation and associated system response, there corresponds a destabilizing internal perturbation. The larger the amplification of the external perturbation, the smaller the intensity of the corresponding destabilizing internal perturbation.
To derive our main result, we used Itô’s interpretation of Wiener processes [22], as opposed to the one of Stratonovich. We explained that they are equivalent when the noise is external but differ when the noise affects the interactions between variables. This would yield a potentially different definition of stochastic structural stability then the one for which our theorem holds. We leave it as an open problem to transpose the relationship between dynamical and structural stability under Stratonovich’s interpretation.
Beyond this technical issue, it has long been acknowledged that local stability analysis is not sufficient to fully grasp the stability of attractors. Outside the linear framework, other stability questions can and must be raised. For instance, the size of basins of attraction can be a fundamental global feature, independent of local stability [27,28]. In models of interacting species, other notions of structural stability have been introduced, based on the feasibility of an equilibrium taking strictly positive values [14–16]. In a nonlinear setting, our stability measures have to be interpreted with care. Indeed, they reflect the effect of local perturbations, which might differ from those induced by directly perturbing parameters of the underlying nonlinear model. How changes in parameters affect the local dynamics depends on the exact form of the vector field.
Since Lyapunov’s seminal work [7], linear stability theory has served as a fundamental reference point. Because it generically provides a qualitative depiction of the dynamical behaviour in the vicinity of fixed points (Hartman–Grobman’s theorem [11]), it is a useful tool to study dynamical properties of nonlinear dynamical systems, and their various attractors. In this paper, we showed that the methodology used to quantify local dynamical stability also provides a measure of local structural stability. In particular, our measures of dynamical and structural stability can be transposed to discrete-time dynamical systems,2 which are important in their own right, but also to deal with limit cycles of continuous-time systems, after making a stroboscopic section of trajectories using the Poincaré map [29]. All in all, this suggest that our theory could serve as a benchmark to improve global, quantitative analysis of structural stability.
Finally, it should be noted that we constructed our measures of dynamical stability to mimic empirical approaches to estimate stability from time-series data, in which the fluctuations around a fixed mean can be understood as the effect of stochastic perturbations of an equilibrium [30,17]. Thus, in the setting of near equilibrium dynamics, our work reveals a strong conceptual link between pragmatic empirical views on stability and the more abstract concept of structural stability. Furthermore, as discussed above, in the linear theory, it is not necessary to consider worst-case scenarios (an unpractical notion from an empirical stand point) for a connection between these two stability notions to hold. To further bridge the gap between empirical and theoretical approaches, it could be worthwhile to investigate the most probable scenarios, given a prior distribution on the set of perturbation directions.
Acknowledgements
The authors thank Michel Loreau, José Montoya and Matthieu Barbier for discussions related to this work. The authors express their gratitude to anonymous reviewers for thorough reading of previous versions of this article. Their constructive and encouraging remarks greatly contributed in improving the clarity of the manuscript.
Appendix A. Dominant eigenvalues of perturbed lifted operator
Recall that is the lifted operator defined from a stable real matrix A and acting on any matrix X as , and that is defined from an arbitrary sequence of real matrices Pk as . Assume that the perturbed operator lies on the boundary between stability and instability, that is,
Here, we show that any operator of the form
must have a real-dominant eigenvalue λϵ<0, associated with an eigenvector Xϵ. This would show, in particular, that as ϵ goes to 1, so that
an identity that was previously needed to prove that .
To show this, suppose the converse, that is: that the dominant eigenvalues of all have non-zero imaginary parts. Arbitrarily, small perturbations of the matrices A and Pk can ensure that the operator has a unique dominant eigenvalue λϵ=iωϵ+αϵ up to complex conjugacy, associated with left and right eigenvectors , respectively. Choose a covariance matrix Σ such that
Note that if there exist no such Σ we can disregard the eigenvalue λϵ and its associated eigenspace as they will play no role on the dynamics restricted to positive semi-definite matrices. Indeed, by construction, the semi-group
preserves the set of real positive matrices, and it is the restriction to that set that is of interest to us. In particular, the starting point C0=Σ becomes, as time flows forward
Writing , we see that Ct converges to
which rotates at frequency ωϵ. It therefore cannot be positive for all t which it should when the subdominant terms in Ct become negligible. We thus get a contradiction, hence λϵ must be real.
To summarize, we have shown that, modulo arbitrary small perturbations of the matrices A and Pk, the dominant eigenvalue of is simple and real. Because the spectrum depends continuously on the matrix entries [31], this implies that among the dominant eigenvalues of one was already real.
Appendix B. Ordering of structural stability measures
In the theorem, we claim that stochastic structural stability relates to the stability radius of matrices following the general inequality (illustrated in figure 2)
with equality when the Jacobian matrix at the equilibrium is normal. Here, we prove this fact. Let us start by stating a lemma from linear algebra.
Lemma B.1. —
For any invertible matrix B acting on , it holds that
Proof. —
Take x*=B−1y/∥B−1y∥ with y normalized and realizing the maximum of ∥B−1y∥. By construction
To show that taking the minimum over all normalized elements x does not give anything smaller, it suffices to choose y*=Bx/∥Bx∥ with x normalized and realizing the minimum of ∥Bx∥. By construction
which is equivalent to
proving the lemma. ▪
With this result in hand, we can write, for any stable real matrix A,
In particular, for any normalized matrix X,
Choosing X as a rank-one orthonormal projector, X=ww*, gives, for any real ω
On the other hand, we also have, using lemma B.1, that
In the upper bound of , choosing ω to be the system’s resonant frequency and w the associated minimizing vector of ∥(iω−A)w∥, and then invoking the triangular inequality, yields
Let us now show that equality holds whenever A is normal. First of all, for normal A, coincides with the spectral abscissa α(A). This is a consequence of the following equality, valid for any normal matrix A and complex number z away from the spectrum of A [8]
| B 1 |
where dist(⋅,⋅) stands for the Hausdorff distance between subsets of the complex plane, equipped with the Euclidean metric. Indeed, taking z=iω, where ω is the imaginary part of the dominant eigenvalue of A, gives . In addition, if A is normal, is also automatically normal. Because A is diagonalizable, we can express the spectrum of from the one of A. Indeed, if {(λi,ui)}i are the complete eigenpairs of A, then are the complete eigenpairs of . If λ0 is the dominant eigenvalue of A, then by definition −ℜ(λ0)=α(A), and thus are dominant eigenvalues of . Applying the above identity (B 1) to the normal operator , namely
and taking z=0 gives , hence , which is the expected equality.
Finally, because the real constant perturbation, is always sufficient to destabilize any stable matrix A, in the light of the previous result, we see that for normal matrices
completing the proof of the theorem.
Footnotes
Indeed, consider the SDE dX=(−a dt+p dWt)X whose nth-order moments satisfy . As soon as p≠0, moments of order n≥2a/p2+1 diverge as time flows forward.
Data accessibility
This paper has no data.
Authors' contributions
Both authors contributed equally to this study.
Competing interests
The authors declare no conflict of interest.
Funding
This work was supported by the TULIP Laboratory of Excellence (ANR-10-LABX-41), the AnaEE France project (ANR-11-INBS-0001) and by the BIOSTASES advanced grant, supported by the European Research Council under the European Union’s Horizon 2020 research and innovation programme (grant agreement no. 666971).
References
- 1.Schmid PJ, Henningson DS. 2012. Stability and transition in shear flows. Berlin, Germany: Springer. [Google Scholar]
- 2.Chandrasekhar S. 1970. Hydrodynamic and hydromagnetic stability. Oxford, UK: Clarendon Press. [Google Scholar]
- 3.Penzien J, Clough R. 1975. Dynamics of structures. New York, NY: McGraw Hill. [Google Scholar]
- 4.Machowski J, Bialek J, Bumby J. 2011. Power system dynamics: stability and control. Chichester, UK: John Wiley & Sons. [Google Scholar]
- 5.Steinfeld JI, Francisco JS, Hase WL. 1999. Chemical kinetics and dynamics. Upper Saddle River, NJ: Prentice Hall. [Google Scholar]
- 6.May RM. 1973. Stability and complexity in model ecosystems. Princeton, NJ: Princeton University Press. [Google Scholar]
- 7.Lyapunov AM. 1992. The general problem of the stability of motion. Doctoral dissertation, University of Kharkov, 1882, reprinted in International Journal of Control, vol. 55, no. 3, pp. 531–534.
- 8.Trefethen LN, Embree M. 2005. Spectra and pseudospectra: the behavior of nonnormal matrices and operators. Princeton, NJ: Princeton University Press. [Google Scholar]
- 9.Allesina S, Tang S. 2012. Stability criteria for complex ecosystems. Nature 483, 205–208. (doi:10.1038/nature10832) [DOI] [PubMed] [Google Scholar]
- 10.Thom R. 1989. Structural stability and morphogenesis. Boston, MA: Addison Wesley. [Google Scholar]
- 11.Katok A, Hasselblatt B. 1997. Introduction to the modern theory of dynamical systems. Cambridge, UK: Cambridge University Press. [Google Scholar]
- 12.Barabás G, Pásztor L, Meszéna G, Ostling A. 2014. Sensitivity analysis of coexistence in ecological communities: theory and application. Ecol. Lett. 17, 1479–1494. (doi:10.1111/ele.12350) [DOI] [PubMed] [Google Scholar]
- 13.Barabás G, Allesina S. 2015. Predicting global community properties from uncertain estimates of interaction strengths. J. R. Soc. Interface 12, 20150218 (doi:10.1098/rsif.2015.0218) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 14.Rohr RP, Saavedra S, Bascompte J. 2014. On the structural stability of mutualistic systems. Science 345, 1253497 (doi:10.1126/science.1253497) [DOI] [PubMed] [Google Scholar]
- 15.Grilli J, Adorisio M, Suweis S, Barabás G, Banavar JR, Allesina S, Maritan A.2015. The geometry of coexistence in large ecosystems. (http://arxiv.org/abs/1507.05337. )
- 16.Saavedra S, Rohr RP, Olesen JM, Bascompte J. 2016. Nested species interactions promote feasibility over stability during the assembly of a pollinator community. Ecol. Evol. 6, 997–1007. (doi:10.1002/ece3.1930) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 17.Arnoldi J-F, Loreau M, Haegeman B. 2016. Resilience, reactivity and variability: a mathematical comparison of ecological stability measures. J. Theor. Biol. 389, 47–59. (doi:10.1016/j.jtbi.2015.10.012) [DOI] [PubMed] [Google Scholar]
- 18.Hinrichsen D, Pritchard AJ. 1986. Stability radii of linear systems. Syst. Control Lett. 7, 1–10. (doi:10.1016/0167-6911(86)90094-0) [Google Scholar]
- 19.Qiu L, Bernhardsson B, Rantzer A, Davison EJ, Young PM, Doyle JC. 1995. A formula for computation of the real stability radius. Automatica 31, 879–890. (doi:10.1016/0005-1098(95)00024-Q) [Google Scholar]
- 20.Buckwar E, Kelly C. 2014. Asymptotic and transient mean-square properties of stochastic systems arising in ecology, fluid dynamics, and system control. SIAM J. Appl. Math. 74, 411–433. (doi:10.1137/120893859) [Google Scholar]
- 21.Arnold L. 1976. Stochastic differential equations: theory and applications. New York, NY: Dover Publications. [Google Scholar]
- 22.Van Kampen NG. 1997. Stochastic processes in physics and chemistry. Amsterdam, The Netherlands: Elsevier. [Google Scholar]
- 23.Watrous J. 2005. Notes on super-operator norms induced by Schatten norms. Quant. Inf. Comput. 5, 58–68. [Google Scholar]
- 24.Chatfield C. 1989. The analysis of time series: an introduction. New York, NY: CRC Press. [Google Scholar]
- 25.Schreiber SJ. 2012. Persistence for stochastic difference equations: a mini-review. J. Diff. Equat. Appl. 18, 1381–1403. (doi:10.1080/10236198.2011.628662) [Google Scholar]
- 26.Smythe J, Moss F, McClintock PVE, Clarkson D. 1983. Ito versus stratonovich revisited. Phys. Lett. A 97, 95–98. (doi:10.1016/0375-9601(83)90520-0) [Google Scholar]
- 27.Holling CS. 1973. Resilience and stability of ecological systems. Annu. Rev. Ecol. Syst. 4, 1–23. (doi:10.1146/annurev.es.04.110173.000245) [Google Scholar]
- 28.Menck PJ, Heitzig J, Marwan N, Kurths J. 2013. How basin stability complements the linear-stability paradigm. Nat. Phys. 9, 89–92. (doi:10.1038/nphys2516) [Google Scholar]
- 29.Brin M, Stuck G. 2015. Introduction to dynamical systems. Cambridge, UK: Cambridge University Press. [Google Scholar]
- 30.Ives AR. 1995. Measuring resilience in stochastic systems. Ecol. Monogr. 65, 217–233. (doi:10.2307/2937138) [Google Scholar]
- 31.Kato T. 1995. Perturbation theory for linear operators. Berlin, Germany: Springer. [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.
Data Availability Statement
This paper has no data.