
Fig. 5.
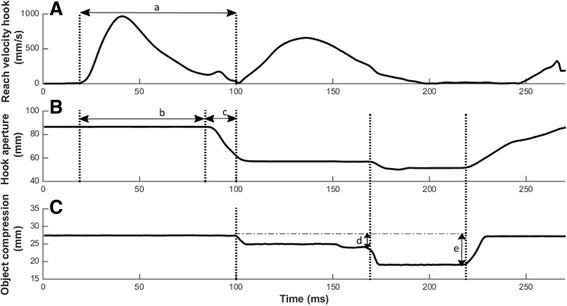
Example of a direct grasping trial with a low-resistance object. a Reach velocity of the hook, b hook aperture and, c the deformation of the object are plotted against the time. Several kinematic variables are represented by a = Reach time, b = Plateau time, c = Hook closing time, d = Compression at moment of grasp, e = Compression during manipulation