
Fig. 2.
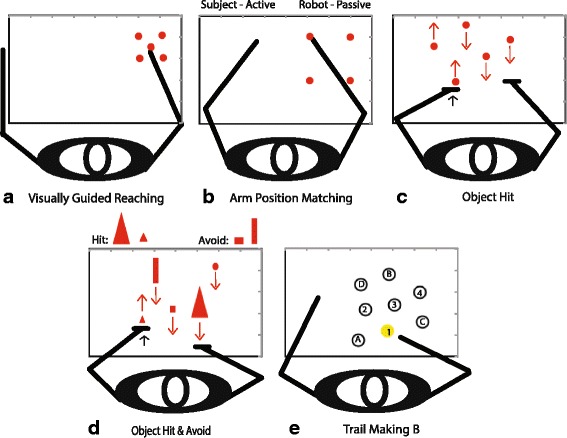
The five KINARM robot tasks used in the study. a Visually guided reaching with the right arm, b Arm position matching with the right arm, c Object hit, d Object hit and avoid, and e. Trail making B (not to scale, example of the alpha-numeric alternation) This figure has been modified from a previous paper [56]