
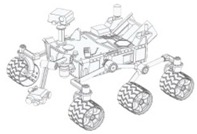
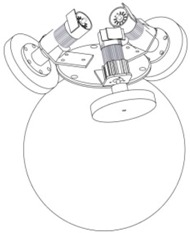
Table 1.
Classification of mobile robots based on the motion system and type of mobility.
| Motion System Based on | ||||
|---|---|---|---|---|
| Wheels | Ball | Legs | ||
| Universal | Omnidirectional | |||
 |
 |
 |
 |
 |
 | ||||
| (a) | (b) | (c) | (d) | (e) |
| Not omnidirectional | Omnidirectional | |||
| Type of mobility | ||||
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
Classification of mobile robots based on the motion system and type of mobility.
| Motion System Based on | ||||
|---|---|---|---|---|
| Wheels | Ball | Legs | ||
| Universal | Omnidirectional | |||
|
|
|
|
|
| ||||
| (a) | (b) | (c) | (d) | (e) |
| Not omnidirectional | Omnidirectional | |||
| Type of mobility | ||||