
Fig. 1.
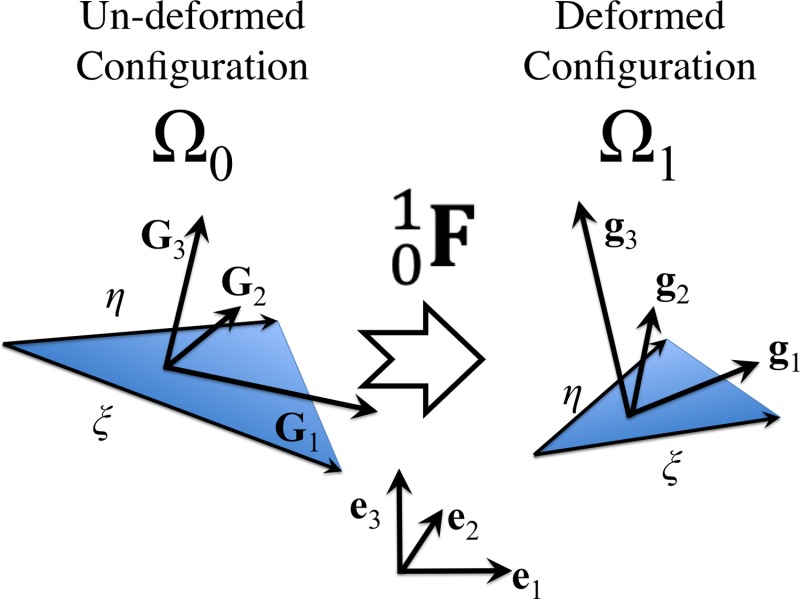
Schematic of a triangular element deformed from un-deformed configuration to deformed configuration via deformation tensor . The covariant surface base vectors and as well as and are not necessarily orthogonal but they are expressed in terms of their components in an orthogonal coordinate system (i.e., ()) to take advantage of matrix algebra.