
Figure 1. Study design.
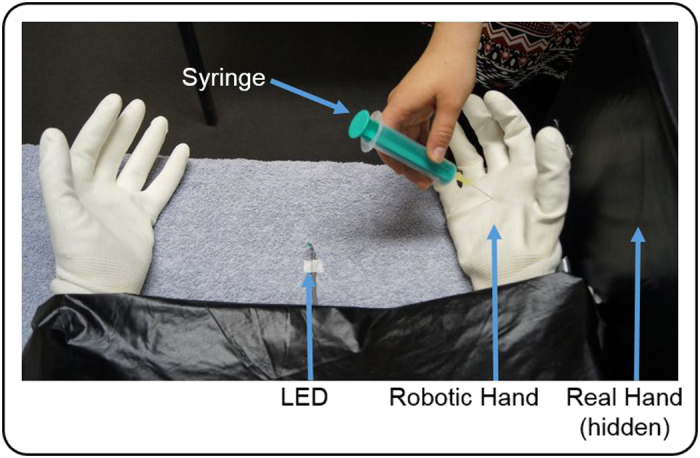
As in the classical rubber hand illusion, participants placed their right hand into a black box, whereas the robotic hand was placed in direct vision in front of the participant. During training, participants kinesthetically imagined flexion-extension movements in spatio-temporal synchrony to the flexion-extension movements of the robotic hand. A small LED thereby announced the beginning of each new MI trial. During feedback, the participants again imagined flexion-extension movements. This time, however, the robotic hand only moved, if the classification algorithm detected the participant’s momentary MI brain state, or 5 seconds were over. The neurofeedback loop was thus implicitly encoded in the robotic hands movements. To test whether the participants had incorporated the robotic hand into their own body schema, a syringe was pricked into the robotic hand after each feedback run, and the participant’s subjective level of authorship and ownership towards the robotic hand was documented.