
Fig 1.
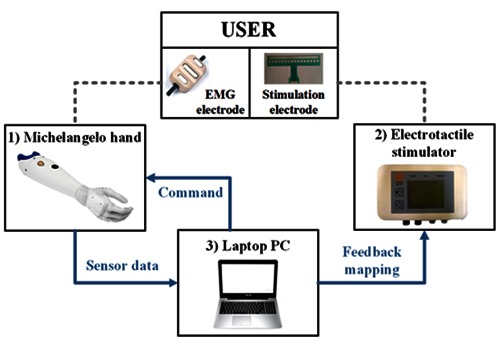
The system setup comprising Michelangelo hand (1), electrotactile stimulation system (2), and the laptop PC (3). The laptop PC ran the control loop, received sensor data (EMG signal and grasping force) from the prosthesis while sending back normalized commands, and sent feedback mapping to the stimulator unit via Bluetooth (blue arrows). EMG signals were recorded from wrist flexor muscles of the residual limb using one EMG electrode connected to the prosthesis (dashed line). The electrotactile feedback was presented to the user through an array electrode placed on the intact forearm