
Figure 8. Different types of gallop resulted from left–right asymmetric drives .
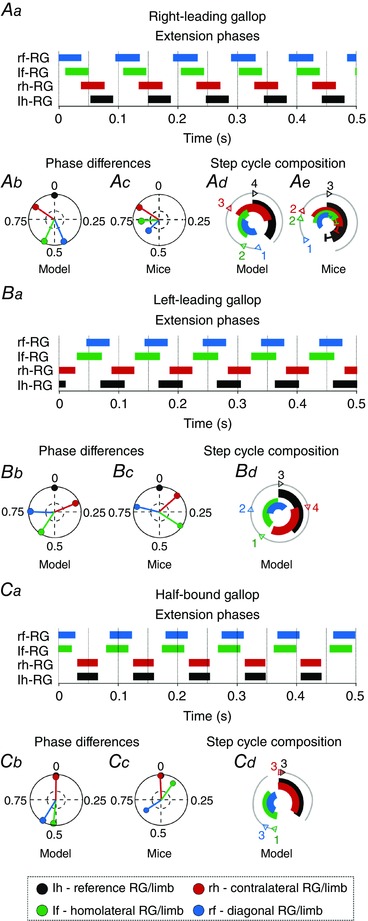
Left–right asymmetric drives were introduced by changing drive parameter [in eqn (9)] for the flexor centres and V3 commissural interneurons from default values in Table 2. For the right‐leading gallop (Aa, Ab, Ad) this parameter was changed to 0.102 for left‐fore, 0.098 for right‐fore, 0.102 for left‐hind, and 0.105 for right‐hind flexor centres and V3. For the left‐leading gallop (Ba, Bb, Bd) the values of in Aa, Ab and Ad were left–right mirrored. For the bound gallop (Ca, Cb, Cd) parameter was changed to 0.101 for left‐fore and 0.099 for right‐fore flexor centres and V3. Aa, Ba and Ca, extension phases of all rhythm generators (RG). Ab, Bb and Cb, circular plots of phase differences (referenced to left hind RG). Ac, Bc and Cc, same circular plots modified from the experimental study of Bellardita & Kiehn (2015, fig. 1F, with permission). Ad, Bd and Cd, circular bar graphs of the extension phase normalized to the step cycle. Ae, circular bar graphs of stance phases modified from the experimental study of Bellardita & Kiehn (2015, fig. 1G, with permission). Experimental graph (Ae) was adjusted to correspond in style to Ad. Abbreviations: F, flexor; f, fore; h, hind; l, left; r, right.