
Fig. 3.
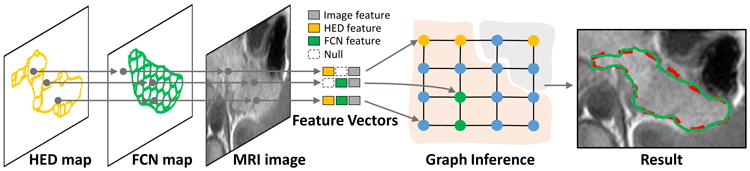
The overview of our graphical model for decision fusion. The feature vector of each node is extracted from its corresponding candidate region of the HED map, the FCN map, and the MRI image. The null feature is defined to refer to the non-detected region in the FCN/HED maps. The graph nodes are then partitioned by graph inference. The result of decision fusion is displayed with the same color notation in Fig. 1.