
Fig. 7.
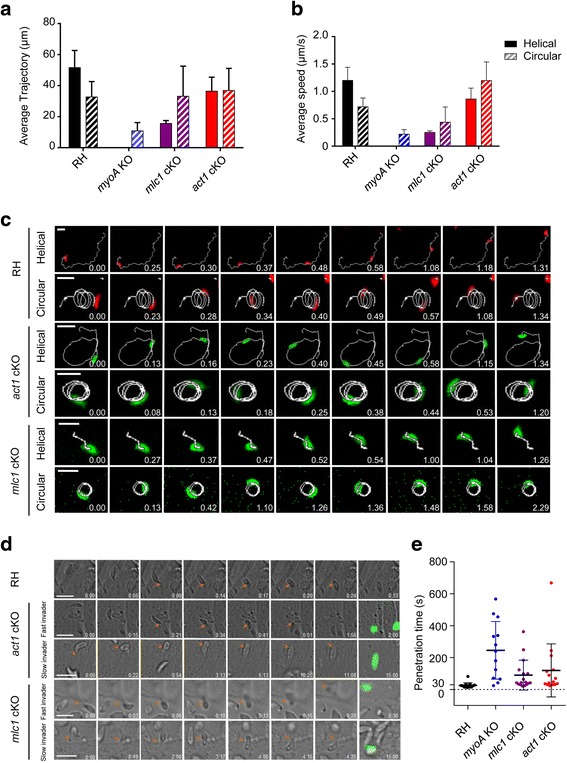
Kinetic analysis of 2D gliding and invasion of MyoA motor complex mutants. 2D analysis of gliding kinetics. a Graphic displays the average trajectory of 20 tracked parasites moving in helical (solid pattern) and circular fashion (dashed pattern). b Average speed of each motility boost of 20 tracked parasites for each strain. Trajectory, distance and time of moving parasites were tracked using the program ImageJ-wrMTrck. Values expressed are average ± standard deviation. c Image series show time lapse video microscopy of RH Δhxgprt, act1 conditional knockout (cKO) and mlc1 cKO gliding kinetics. Circular and helical motions were recorded at one frame per second and analysed using the Fiji wrMTrck software. Software-generated tracks are overlaid in different times along parasites position. Scale bar represents 10 μm, numbers indicate time in minutes.seconds. d Image series showing real time invasion assays of RH Δhxgprt, act1 cKO and mlc1 cKO. Real time invading parasites were recorded at one frame per second in DIC with a final image taken with FITC for the act1 cKO and mlc1 cKO to distinguish the YFP+ knockouts. Orange arrows indicate the tight junction from initial formation to closure. Scale bar represents 10 μm, numbers indicate time in minutes:seconds. e Penetration time of indicated strains determined by time lapse microscopy from tight junction formation to closure. Invasion events and time were tracked and calculated manually using the time stamper tool. Error bars represent ± standard deviation, n = 15 invasion events