
Fig. 1.
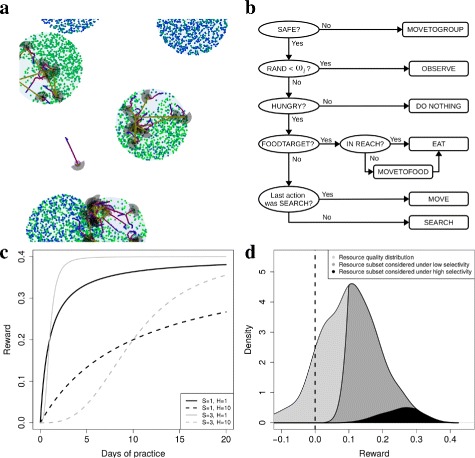
Model details. a Simulation snapshot. Each forager is indicated by a SEARCH area (gray semi-circle), REACH (gray circle) and a movement trajectory (red to blue line). When a foragers observes another forager the foragers are connected by an olive-green line. For illustration purposes, the resource items are shown as colored circles, and patches by a larger gray circles. Each patch can be assumed to be a distinct patch type, with unique resource types (different colours within a patch). b Illustration of decision-making algorithm. Rectangles are actions and ellipses are decision-making points. After completing one of the actions at the right hand side, all foragers start the decision-making process at the top left (SAFE?). RAND is a random number between 0 and 1, and ω i is the probability to do OBSERVE. MOVETOFOOD is always followed by EAT. MOVE consists of at many 1 meter steps to complete a distance of δ i. c Illustration of how rewards e ir change with time spent practicing that skill for different resource types (Eq. 5): resources for which not much practice is needed (solid lines, low H) and those for which a lot of practice is need (dashed line, high H); and resources for which rewards increase fast immediately (black lines, low S) and those for which they increase slowly initially (gray lines, high S). d Illustration of how selectivity (Eq. 1) affects which subset of resources are chosen: overall resource quality distribution given by N(0.1,0.1) (light gray) and subsets chosen when selectivity is low (dark gray, a ie=0.1) and high (black, a ie=0.3), given σ i=5 and assuming the forager knows all resources perfectly