
Fig. 2.
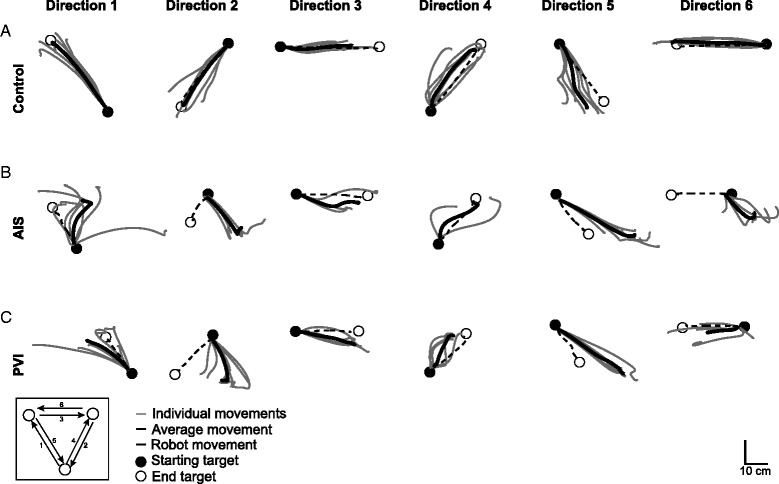
Hand movements in the kinesthesia task. Individual and average hand movements in each direction for an exemplar participant from each group. White circles represent the location of robotic movement endpoints. Black dashed lines show the mirrored movement of the robotically moved passive arm from the first target (black circle) to the end target (white circle). The direction of movement between the three targets is shown in the bottom left corner. Light grey lines show the movements performed by the active arm to mirror-match the movement of the robot. Dark grey lines indicate the average hand movement in each direction. a A 15 year old female typically developing child/adolescent demonstrates excellent matching of the robot movement with low IDE and excellent PLR. b An 11 year old female participant with AIS shows difficulty in matching the length (PLR) and direction (IDE) of movement, and does not complete all 6 trials within the movements (direction 3 and 4). c A 15 year old male with PVI moves with large IDE in most directions