
Figure 1. State feedback control.
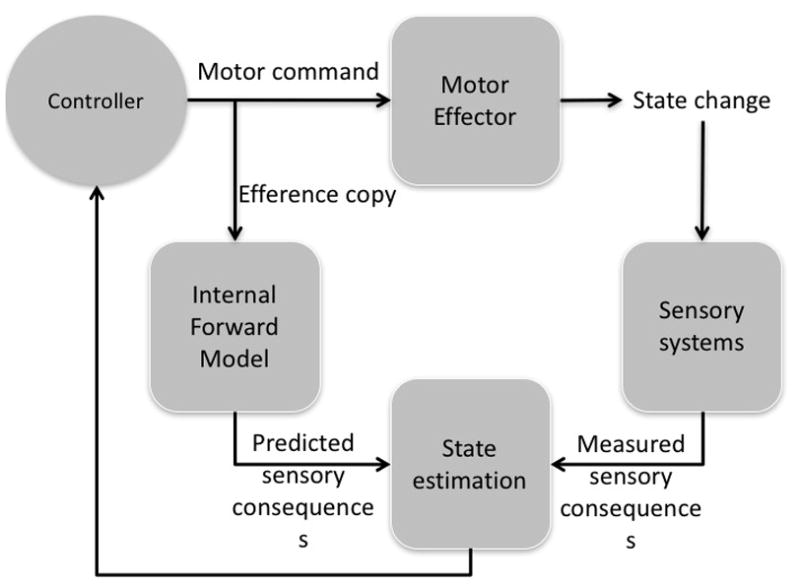
State feedback control models typically include a motor controller that sends commands to a motor effector, which in turn result in a change of state, such as a change in the position of an arm. State changes are detected by sensory systems. Most models also include an internal forward model that receives a copy of the motor command issued by the controller and generates a prediction of the sensory consequences of the command that can be compared against the measured sensory consequences. The error between the predicted and measured sensory consequences is used as a correction signal to correct such error. Image adapted from Shadmehr and Krakauer 2008.