
Figure 2.
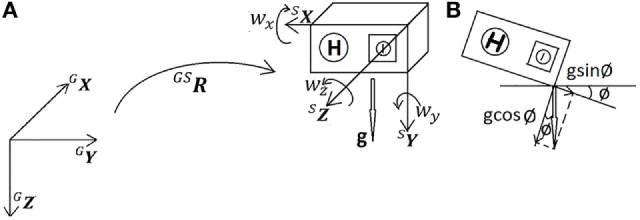
Six degrees of freedom attitude estimation. (A) Relationship between global frame (G-frame) and sensor frame (S-frame) was described by rotation matrix GSR. During stable phases, the accelerometer measures gravity g, and the gyroscope measures angular velocity [wx wy wz], in sensor frame S. (B) Presence of an inclination angle ø led to a change from vertical axis GZ to (gravity g was split into cosine and sine terms).