
Fig. 6.
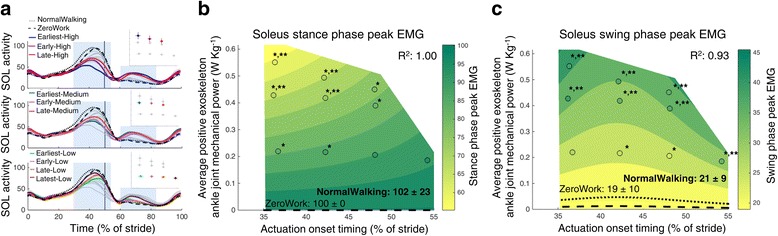
Electromyography of the m. soleus. Time series show population averages for EMG of the m. soleus (SOL) averaged for the left and right leg and plotted from heel contact to heel contact (a). The grey vertical line represents opposite heel contact. All powered conditions are shown in grey, with selected conditions in color. Subplots at top show which conditions are shown in color. Blue rectangles show the periods where a peak EMG value was analyzed. Repeated measures ANOVA indicated significant differences between conditions for the peak EMG in the stance phase (between 1 and 62% of the stride; P < 0.001) and the peak EMG in the beginning of the swing phase (between 62 and 80% of the stride; P < 0.001). The effect of actuation timing and exoskeleton power on peak EMG in the beginning of the stance phase (b) and the beginning of the swing phase (c) is indicated by a regression analysis. The surface gradient is the result of a two-dimensional regression for which R2 is provided for the peak EMG during the stance phase (P < 0.001) and during the beginning of the swing phase (P < 0.001). The black dotted line shows the NormalWalking condition and the black dashed line shows the ZeroWork condition with the absolute value for both conditions. *indicates a statistically significant reduction versus ZeroWork and ** indicates a statistically significant reduction versus NormalWalking based on post-hoc t-tests with Šídák-Holm correction (P ≤ 0.05)